Ekvationssystem. Detaljerad teori med exempel (2020). Exempel på system av linjära ekvationer: lösningsmetod Skriva en allmän lösning till homogena och inhomogena linjära algebraiska system med hjälp av vektorer av det fundamentala lösningssystemet
Att lösa system av linjära algebraiska ekvationer (SLAE) är utan tvekan det viktigaste ämnet i en linjär algebrakurs. Ett stort antal problem från alla grenar av matematiken handlar om att lösa linjära ekvationssystem. Dessa faktorer förklarar anledningen till denna artikel. Materialet i artikeln är valt och strukturerat så att du med dess hjälp kan
- välj den optimala metoden för att lösa ditt system av linjära algebraiska ekvationer,
- studera teorin om den valda metoden,
- lös ditt linjära ekvationssystem genom att överväga detaljerade lösningar på typiska exempel och problem.
Kort beskrivning av artikelmaterialet.
Först ger vi alla nödvändiga definitioner, begrepp och introducerar notationer.
Därefter kommer vi att överväga metoder för att lösa system av linjära algebraiska ekvationer där antalet ekvationer är lika med antalet okända variabler och som har en unik lösning. För det första kommer vi att fokusera på Cramers metod, för det andra kommer vi att visa matrismetoden för att lösa sådana ekvationssystem, och för det tredje kommer vi att analysera Gauss-metoden (metoden för sekventiell eliminering av okända variabler). För att konsolidera teorin kommer vi definitivt att lösa flera SLAEs på olika sätt.
Efter detta kommer vi att gå vidare till att lösa system av linjära algebraiska ekvationer av allmän form, där antalet ekvationer inte sammanfaller med antalet okända variabler eller systemets huvudmatris är singular. Låt oss formulera Kronecker-Capelli-satsen, som gör att vi kan fastställa kompatibiliteten för SLAE. Låt oss analysera lösningen av system (om de är kompatibla) med hjälp av konceptet med en basmoll i en matris. Vi kommer också att överväga Gauss-metoden och i detalj beskriva lösningarna på exemplen.
Vi kommer definitivt att uppehålla oss vid strukturen för den allmänna lösningen av homogena och inhomogena system av linjära algebraiska ekvationer. Låt oss ge begreppet ett fundamentalt system av lösningar och visa hur den allmänna lösningen av en SLAE skrivs med hjälp av vektorerna för det grundläggande lösningssystemet. För en bättre förståelse, låt oss titta på några exempel.
Avslutningsvis kommer vi att överväga ekvationssystem som kan reduceras till linjära, samt olika problem i lösningen av vilka SLAE:er uppstår.
Sidnavigering.
Definitioner, begrepp, beteckningar.
Vi kommer att betrakta system av p linjära algebraiska ekvationer med n okända variabler (p kan vara lika med n) av formen
Okända variabler, - koefficienter (vissa reella eller komplexa tal), - fria termer (även reella eller komplexa tal).
Denna form av inspelning SLAE kallas samordna.
I matrisform att skriva detta ekvationssystem har formen,
Var  - systemets huvudmatris, - en kolumnmatris med okända variabler, - en kolumnmatris med fria termer.
- systemets huvudmatris, - en kolumnmatris med okända variabler, - en kolumnmatris med fria termer.
Lägger vi till en matriskolumn av fria termer till matris A som (n+1):e kolumnen får vi s.k. utökad matris linjära ekvationssystem. Vanligtvis betecknas en utökad matris med bokstaven T, och kolumnen med fria termer separeras med en vertikal linje från de återstående kolumnerna, det vill säga, 
Lösa ett system av linjära algebraiska ekvationer kallas en uppsättning värden av okända variabler som förvandlar alla ekvationer i systemet till identiteter. Matrisekvationen för givna värden för de okända variablerna blir också en identitet.
Om ett ekvationssystem har minst en lösning, så kallas det gemensam.
Om ett ekvationssystem inte har några lösningar, så kallas det icke-fogad.
Om en SLAE har en unik lösning, så kallas den vissa; om det finns mer än en lösning, då – osäker.
Om de fria termerna för alla ekvationer i systemet är lika med noll ![]() , då kallas systemet homogen, annars - heterogen.
, då kallas systemet homogen, annars - heterogen.
Lösa elementära system av linjära algebraiska ekvationer.
Om antalet ekvationer i ett system är lika med antalet okända variabler och determinanten för dess huvudmatris inte är lika med noll, kommer sådana SLAE att kallas elementärt. Sådana ekvationssystem har en unik lösning, och i fallet med ett homogent system är alla okända variabler lika med noll.
Vi började studera sådana SLAE på gymnasiet. När vi löste dem tog vi en ekvation, uttryckte en okänd variabel i termer av andra och substituerade den i de återstående ekvationerna, tog sedan nästa ekvation, uttryckte nästa okända variabel och substituerade den med andra ekvationer, och så vidare. Eller så använde de additionsmetoden, det vill säga de lade till två eller flera ekvationer för att eliminera några okända variabler. Vi kommer inte att uppehålla oss vid dessa metoder i detalj, eftersom de i huvudsak är modifieringar av Gauss-metoden.
De huvudsakliga metoderna för att lösa elementära system av linjära ekvationer är Cramermetoden, matrismetoden och Gaussmetoden. Låt oss reda ut dem.
Lösa linjära ekvationssystem med Cramers metod.
Antag att vi behöver lösa ett system av linjära algebraiska ekvationer 
där antalet ekvationer är lika med antalet okända variabler och determinanten för systemets huvudmatris skiljer sig från noll, det vill säga .
Låta vara bestämningsfaktorn för systemets huvudmatris, och ![]() - determinanter för matriser som erhålls från A genom ersättning 1:a, 2:a, …, n:a kolumnen respektive kolumnen med fria medlemmar:
- determinanter för matriser som erhålls från A genom ersättning 1:a, 2:a, …, n:a kolumnen respektive kolumnen med fria medlemmar: 
Med denna notation beräknas okända variabler med formlerna för Cramers metod som  . Så här hittas lösningen till ett system av linjära algebraiska ekvationer med Cramers metod.
. Så här hittas lösningen till ett system av linjära algebraiska ekvationer med Cramers metod.
Exempel.
Cramers metod  .
.
Lösning.
Systemets huvudmatris har formen  . Låt oss beräkna dess determinant (om nödvändigt, se artikeln):
. Låt oss beräkna dess determinant (om nödvändigt, se artikeln): 
Eftersom determinanten för systemets huvudmatris inte är noll, har systemet en unik lösning som kan hittas med Cramers metod.
Låt oss komponera och beräkna de nödvändiga bestämningsfaktorerna ![]() (vi får determinanten genom att ersätta den första kolumnen i matris A med en kolumn med fria termer, determinanten genom att ersätta den andra kolumnen med en kolumn med fria termer och genom att ersätta den tredje kolumnen i matris A med en kolumn med fria termer) :
(vi får determinanten genom att ersätta den första kolumnen i matris A med en kolumn med fria termer, determinanten genom att ersätta den andra kolumnen med en kolumn med fria termer och genom att ersätta den tredje kolumnen i matris A med en kolumn med fria termer) : 
Hitta okända variabler med formler  :
:
Svar:
Den största nackdelen med Cramers metod (om den kan kallas en nackdel) är komplexiteten i att beräkna determinanter när antalet ekvationer i systemet är fler än tre.
Lösa system av linjära algebraiska ekvationer med hjälp av matrismetoden (med en invers matris).
Låt ett system av linjära algebraiska ekvationer ges i matrisform, där matrisen A har dimensionen n gånger n och dess determinant är icke-noll.
Eftersom matris A är inverterbar, det vill säga det finns en invers matris. Om vi multiplicerar båda sidor av likheten med vänster får vi en formel för att hitta en matriskolumn med okända variabler. Så här fick vi en lösning på ett system av linjära algebraiska ekvationer med matrismetoden.
Exempel.
Lös system av linjära ekvationer matrismetod.
Lösning.
Låt oss skriva om ekvationssystemet i matrisform: 
Därför att
då kan SLAE lösas med matrismetoden. Med hjälp av den inversa matrisen kan lösningen på detta system hittas som  .
.
Låt oss konstruera en invers matris med hjälp av en matris från algebraiska tillägg av element i matris A (om nödvändigt, se artikeln): 
Det återstår att beräkna matrisen av okända variabler genom att multiplicera den inversa matrisen  till en matriskolumn med gratismedlemmar (om nödvändigt, se artikeln):
till en matriskolumn med gratismedlemmar (om nödvändigt, se artikeln): 
Svar:
 eller i en annan notation x 1 = 4, x 2 = 0, x 3 = -1.
eller i en annan notation x 1 = 4, x 2 = 0, x 3 = -1.
Huvudproblemet när man hittar lösningar på system med linjära algebraiska ekvationer med hjälp av matrismetoden är komplexiteten i att hitta den inversa matrisen, särskilt för kvadratiska matriser av ordning högre än tredje.
Lösa linjära ekvationssystem med Gauss-metoden.
Antag att vi behöver hitta en lösning på ett system med n linjära ekvationer med n okända variabler 
vars determinant för huvudmatrisen skiljer sig från noll.
Kärnan i Gauss-metoden består av att sekventiellt eliminera okända variabler: först exkluderas x 1 från alla ekvationer i systemet, med början från den andra, sedan exkluderas x 2 från alla ekvationer, med början från den tredje, och så vidare, tills endast den okända variabeln x n finns kvar i den sista ekvationen. Denna process att transformera systemekvationer för att sekventiellt eliminera okända variabler kallas direkt Gaussisk metod. Efter att ha slutfört det framåtriktade slaget av Gaussmetoden, hittas x n från den sista ekvationen, med hjälp av detta värde från den näst sista ekvationen, x n-1 beräknas, och så vidare, x 1 hittas från den första ekvationen. Processen att beräkna okända variabler när man går från den sista ekvationen i systemet till den första kallas invers av Gaussmetoden.
Låt oss kort beskriva algoritmen för att eliminera okända variabler.
Vi kommer att anta att eftersom vi alltid kan uppnå detta genom att ordna om systemets ekvationer. Låt oss eliminera den okända variabeln x 1 från alla ekvationer i systemet, börja med den andra. För att göra detta lägger vi till den första ekvationen i systemet, multiplicerad med , till den tredje ekvationen adderar vi den första, multiplicerad med , och så vidare, till den n:te ekvationen adderar vi den första, multiplicerad med . Ekvationssystemet efter sådana transformationer kommer att ta formen 
var och  .
.
Vi skulle ha kommit fram till samma resultat om vi hade uttryckt x 1 i termer av andra okända variabler i systemets första ekvation och substituerat det resulterande uttrycket i alla andra ekvationer. Variabeln x 1 exkluderas alltså från alla ekvationer, med början från den andra.
Därefter fortsätter vi på ett liknande sätt, men bara med en del av det resulterande systemet, som är markerat i figuren 
För att göra detta, till den tredje ekvationen i systemet lägger vi till den andra, multiplicerat med , till den fjärde ekvationen adderar vi den andra, multiplicerat med , och så vidare, till den n:te ekvationen adderar vi den andra, multiplicerat med . Ekvationssystemet efter sådana transformationer kommer att ta formen 
var och  . Variabeln x 2 exkluderas alltså från alla ekvationer, med början från den tredje.
. Variabeln x 2 exkluderas alltså från alla ekvationer, med början från den tredje.
Därefter fortsätter vi med att eliminera det okända x 3, medan vi agerar på liknande sätt med den del av systemet som är markerad i figuren 
Så vi fortsätter den direkta utvecklingen av den Gaussiska metoden tills systemet tar formen 
Från detta ögonblick börjar vi baksidan av Gaussmetoden: vi beräknar x n från den sista ekvationen som , med hjälp av det erhållna värdet på x n hittar vi x n-1 från den näst sista ekvationen, och så vidare, vi hittar x 1 från den första ekvationen .
Exempel.
Lös system av linjära ekvationer Gauss metod.
Lösning.
Låt oss exkludera den okända variabeln x 1 från systemets andra och tredje ekvationer. För att göra detta lägger vi till båda sidor av den andra och tredje ekvationen motsvarande delar av den första ekvationen, multiplicerat med respektive med: 
Nu eliminerar vi x 2 från den tredje ekvationen genom att lägga till vänster och höger sida på den andra ekvationens vänstra och högra sida, multiplicerat med: 
Detta avslutar det framåtgående slaget av Gauss-metoden, vi börjar det omvända slaget.
Från den sista ekvationen i det resulterande ekvationssystemet finner vi x 3: 
Från den andra ekvationen får vi .
Från den första ekvationen hittar vi den kvarvarande okända variabeln och fullföljer därmed motsatsen till Gaussmetoden.
Svar:
X 1 = 4, x 2 = 0, x 3 = -1.
Lösa system av linjära algebraiska ekvationer av allmän form.
I allmänhet sammanfaller inte antalet ekvationer i systemet p med antalet okända variabler n:
Sådana SLAE:er kanske inte har några lösningar, har en enda lösning eller har oändligt många lösningar. Detta påstående gäller även ekvationssystem vars huvudmatris är kvadratisk och singular.
Kronecker-Capelli-satsen.
Innan man hittar en lösning på ett system av linjära ekvationer är det nödvändigt att fastställa dess kompatibilitet. Svaret på frågan när SLAE är kompatibelt och när det är inkonsekvent ges av Kronecker-Capelli-satsen:
För att ett ekvationssystem med n okända (p kan vara lika med n) ska vara konsekvent, är det nödvändigt och tillräckligt att rangordningen för systemets huvudmatris är lika med rangordningen för den utökade matrisen, dvs. , Rank(A)=Rank(T).
Låt oss som ett exempel betrakta tillämpningen av Kronecker-Capelli-satsen för att bestämma kompatibiliteten för ett system av linjära ekvationer.
Exempel.
Ta reda på om systemet med linjära ekvationer har  lösningar.
lösningar.
Lösning.
 . Låt oss använda metoden att gränsa till minderåriga. Mindre av andra ordningen
. Låt oss använda metoden att gränsa till minderåriga. Mindre av andra ordningen  skiljer sig från noll. Låt oss titta på de minderåriga av tredje ordningen som gränsar till det:
skiljer sig från noll. Låt oss titta på de minderåriga av tredje ordningen som gränsar till det: 
Eftersom alla angränsande minderåriga av tredje ordningen är lika med noll, är huvudmatrisens rangordning lika med två.
I sin tur rangen för den utökade matrisen  är lika med tre, eftersom minor är av tredje ordningen
är lika med tre, eftersom minor är av tredje ordningen 
skiljer sig från noll.
Således, Rang(A), därför, med hjälp av Kronecker-Capelli-satsen, kan vi dra slutsatsen att det ursprungliga systemet med linjära ekvationer är inkonsekvent.
Svar:
Systemet har inga lösningar.
Så vi har lärt oss att fastställa inkonsekvensen i ett system med hjälp av Kronecker-Capelli-satsen.
Men hur hittar man en lösning på en SLAE om dess kompatibilitet är etablerad?
För att göra detta behöver vi begreppet basmoll av en matris och en sats om rangordningen för en matris.
Mollen av högsta ordningen i matrisen A, skild från noll, kallas grundläggande.
Av definitionen av en basisminor följer att dess ordning är lika med matrisens rangordning. För en matris A som inte är noll kan det finnas flera basismolorer, det finns alltid en basismoll.
Tänk till exempel på matrisen  .
.
Alla tredje ordningens mindre i denna matris är lika med noll, eftersom elementen i den tredje raden i denna matris är summan av motsvarande element i den första och andra raden.
Följande andra ordningens minderåriga är grundläggande, eftersom de inte är noll 
Minderåriga  är inte grundläggande, eftersom de är lika med noll.
är inte grundläggande, eftersom de är lika med noll.
Matrix rangsats.
Om rangordningen för en matris av ordningen p till n är lika med r, så uttrycks alla rad- (och kolumnelement) i matrisen som inte utgör den valda grundmolllinjen linjärt i termer av motsvarande rad- (och kolumnelement) som bildar grunden mindre.
Vad säger matrisrangsatsen oss?
Om vi, enligt Kronecker-Capelli-satsen, har fastställt systemets kompatibilitet, väljer vi valfri basmoll av systemets huvudmatris (dess ordning är lika med r), och utesluter alla ekvationer som gör det från systemet. inte utgöra den valda basen minor. Den SLAE som erhålls på detta sätt kommer att vara ekvivalent med den ursprungliga, eftersom de kasserade ekvationerna fortfarande är redundanta (enligt matrisrangsatsen är de en linjär kombination av de återstående ekvationerna).
Som ett resultat, efter att ha förkastat onödiga ekvationer i systemet, är två fall möjliga.
Om antalet ekvationer r i det resulterande systemet är lika med antalet okända variabler, kommer det att vara definitivt och den enda lösningen kan hittas med Cramermetoden, matrismetoden eller Gaussmetoden.
Exempel.
 .
.
Lösning.
Rang för systemets huvudmatris  är lika med två, eftersom moll är av andra ordningen
är lika med två, eftersom moll är av andra ordningen  skiljer sig från noll. Utökad matrisrankning
skiljer sig från noll. Utökad matrisrankning  är också lika med två, eftersom den enda tredje ordningens moll är noll
är också lika med två, eftersom den enda tredje ordningens moll är noll 
och den andra ordningens moll som betraktas ovan skiljer sig från noll. Baserat på Kronecker-Capelli-satsen kan vi hävda kompatibiliteten för det ursprungliga systemet med linjära ekvationer, eftersom Rank(A)=Rank(T)=2.
Som grund mindre tar vi . Den bildas av koefficienterna för de första och andra ekvationerna: 
Systemets tredje ekvation deltar inte i bildandet av grundminor, så vi utesluter den från systemet baserat på satsen om matrisens rang: 
Så här fick vi fram ett elementärt system av linjära algebraiska ekvationer. Låt oss lösa det med Cramers metod: 
Svar:
x 1 = 1, x 2 = 2.
Om antalet ekvationer r i den resulterande SLAE är mindre än antalet okända variabler n, så lämnar vi på vänster sida av ekvationerna termerna som utgör basen minor, och vi överför de återstående termerna till de högra sidorna av ekvationerna systemets ekvationer med motsatt tecken.
De okända variablerna (r av dem) som finns kvar på vänster sida av ekvationerna kallas huvud.
Okända variabler (det finns n - r bitar) som finns på höger sida kallas fri.
Nu tror vi att fria okända variabler kan ta godtyckliga värden, medan de största okända variablerna kommer att uttryckas genom fria okända variabler på ett unikt sätt. Deras uttryck kan hittas genom att lösa den resulterande SLAE med Cramer-metoden, matrismetoden eller Gauss-metoden.
Låt oss titta på det med ett exempel.
Exempel.
Lös ett system av linjära algebraiska ekvationer  .
.
Lösning.
Låt oss hitta rangordningen för systemets huvudmatris  genom metoden att gränsa till minderåriga. Låt oss ta en 1 1 = 1 som en moll som inte är noll av första ordningen. Låt oss börja söka efter en moll som inte är noll av andra ordningen som gränsar till denna moll:
genom metoden att gränsa till minderåriga. Låt oss ta en 1 1 = 1 som en moll som inte är noll av första ordningen. Låt oss börja söka efter en moll som inte är noll av andra ordningen som gränsar till denna moll: 
Så här hittade vi en moll som inte är noll av andra ordningen. Låt oss börja söka efter en moll som inte är noll av tredje ordningen: 
Således är rangen på huvudmatrisen tre. Rangen på den utökade matrisen är också lika med tre, det vill säga systemet är konsekvent.
Vi tar den funna icke-noll-moll av tredje ordningen som grund ett.
För tydlighetens skull visar vi de element som utgör grundminor: 
Vi lämnar termerna som är involverade i basmoll på vänster sida av systemekvationerna och överför resten med motsatta tecken till höger sida: 
Låt oss ge de fria okända variablerna x 2 och x 5 godtyckliga värden, det vill säga vi accepterar ![]() , där finns godtyckliga siffror. I det här fallet kommer SLAE att ta formen
, där finns godtyckliga siffror. I det här fallet kommer SLAE att ta formen 
Låt oss lösa det resulterande elementära systemet av linjära algebraiska ekvationer med Cramers metod: 
Därav, .
I ditt svar, glöm inte att ange fria okända variabler.
Svar:
Var finns godtyckliga siffror.
Sammanfatta.
För att lösa ett system av allmänna linjära algebraiska ekvationer, bestämmer vi först dess kompatibilitet med hjälp av Kronecker-Capelli-satsen. Om rankningen av huvudmatrisen inte är lika med rankningen av den utökade matrisen, drar vi slutsatsen att systemet är inkompatibelt.
Om rankningen av huvudmatrisen är lika med rankningen av den utökade matrisen, väljer vi en basisminor och förkastar systemets ekvationer som inte deltar i bildandet av den valda basminoren.
Om ordningen för basminor är lika med antalet okända variabler, har SLAE en unik lösning, som kan hittas med vilken metod som helst som vi känner till.
Om ordningen för basminor är mindre än antalet okända variabler, lämnar vi på vänster sida av systemekvationerna termerna med de huvudsakliga okända variablerna, överför de återstående termerna till höger sida och ger godtyckliga värden till de fria okända variablerna. Från det resulterande systemet av linjära ekvationer finner vi de viktigaste okända variablerna med Cramermetoden, matrismetoden eller Gaussmetoden.
Gauss metod för att lösa system av linjära algebraiska ekvationer av allmän form.
Gaussmetoden kan användas för att lösa system av linjära algebraiska ekvationer av vilket slag som helst utan att först testa dem för konsistens. Processen med sekventiell eliminering av okända variabler gör det möjligt att dra en slutsats om både SLAE:s kompatibilitet och inkompatibilitet, och om det finns en lösning gör det det möjligt att hitta den.
Ur beräkningssynpunkt är den Gaussiska metoden att föredra.
Se dess detaljerade beskrivning och analyserade exempel i artikeln Gauss metod för att lösa system av allmänna linjära algebraiska ekvationer.
Att skriva en generell lösning till homogena och inhomogena linjära algebraiska system med hjälp av vektorer för det fundamentala lösningssystemet.
I det här avsnittet kommer vi att prata om samtidiga homogena och inhomogena system av linjära algebraiska ekvationer som har ett oändligt antal lösningar.
Låt oss först ta itu med homogena system.
Grundläggande system av lösningar homogent system av p linjära algebraiska ekvationer med n okända variabler är en samling (n – r) linjärt oberoende lösningar av detta system, där r är ordningen för basmoll i systemets huvudmatris.
Om vi betecknar linjärt oberoende lösningar av en homogen SLAE som X (1) , X (2) , ..., X (n-r) (X (1) , X (2) , ..., X (n-r) är kolumnära matriser med dimensionen n gånger 1) , då representeras den allmänna lösningen av detta homogena system som en linjär kombination av vektorer av det fundamentala systemet av lösningar med godtyckliga konstanta koefficienter C 1, C 2, ..., C (n-r), som är, .
Vad betyder termen generell lösning av ett homogent system av linjära algebraiska ekvationer (oroslau)?
Innebörden är enkel: formeln specificerar alla möjliga lösningar av den ursprungliga SLAE, med andra ord, med valfri uppsättning värden av godtyckliga konstanter C 1, C 2, ..., C (n-r), med hjälp av formeln kommer vi att erhålla en av lösningarna av den ursprungliga homogena SLAE.
Således, om vi hittar ett grundläggande system av lösningar, kan vi definiera alla lösningar av denna homogena SLAE som .
Låt oss visa processen att konstruera ett grundläggande system av lösningar för en homogen SLAE.
Vi väljer basmoll för det ursprungliga systemet av linjära ekvationer, utesluter alla andra ekvationer från systemet och överför alla termer som innehåller fria okända variabler till högersidan av systemets ekvationer med motsatta tecken. Låt oss ge de fria okända variablerna värdena 1,0,0,...,0 och beräkna de viktigaste okända genom att lösa det resulterande elementära systemet av linjära ekvationer på något sätt, till exempel med Cramer-metoden. Detta kommer att resultera i X (1) - den första lösningen av det grundläggande systemet. Om vi ger de fria okända värdena 0,1,0,0,...,0 och beräknar de viktigaste okända, får vi X (2) . Och så vidare. Om vi tilldelar värdena 0.0,…,0.1 till de fria okända variablerna och beräknar de viktigaste okända, får vi X (n-r) . På detta sätt kommer ett grundläggande system av lösningar till en homogen SLAE att konstrueras och dess allmänna lösning kan skrivas i formen .
För inhomogena system av linjära algebraiska ekvationer representeras den allmänna lösningen i formen , där är den allmänna lösningen av motsvarande homogena system, och är den speciella lösningen av den ursprungliga inhomogena SLAE, som vi får genom att ge de fria okända värdena 0,0,...,0 och beräkna värdena för de viktigaste okända.
Låt oss titta på exempel.
Exempel.
Hitta det grundläggande lösningssystemet och den allmänna lösningen av ett homogent system av linjära algebraiska ekvationer  .
.
Lösning.
Rangen för huvudmatrisen för homogena system av linjära ekvationer är alltid lika med rangordningen för den utökade matrisen. Låt oss hitta rangordningen för huvudmatrisen med hjälp av metoden att gränsa till minderåriga. Som en moll som inte är noll av första ordningen tar vi elementet a 1 1 = 9 i systemets huvudmatris. Låt oss hitta den gränsande moll som inte är noll av andra ordningen: 
En mindre av den andra ordningen, som skiljer sig från noll, har hittats. Låt oss gå igenom de minderåriga av tredje ordningen som gränsar till det på jakt efter en icke-noll: 
Alla gränsande minderåriga av tredje ordningen är lika med noll, därför är rangordningen för huvudmatrisen och den utökade matrisen lika med två. Låt oss ta . För tydlighetens skull, låt oss notera de delar av systemet som bildar det: 
Den tredje ekvationen av den ursprungliga SLAE deltar inte i bildandet av grundminor, därför kan den uteslutas: 
Vi lämnar termerna som innehåller de viktigaste okända på de högra sidorna av ekvationerna och överför termerna med fria okända till höger:
Låt oss konstruera ett grundläggande system av lösningar till det ursprungliga homogena systemet av linjära ekvationer. Det grundläggande lösningssystemet för denna SLAE består av två lösningar, eftersom den ursprungliga SLAE innehåller fyra okända variabler, och ordningen för dess basisminor är lika med två. För att hitta X (1) ger vi de fria okända variablerna värdena x 2 = 1, x 4 = 0, sedan hittar vi de viktigaste okända från ekvationssystemet  .
.
- System m linjära ekvationer med n okänd.
Lösa ett system av linjära ekvationer- det här är en sådan uppsättning siffror ( x 1, x 2, …, x n), när den substitueras i var och en av systemets ekvationer, erhålls den korrekta likheten.
Var aij, i = 1, …, m; j = 1, …, n— Systemkoefficienter.
bi, i = 1, …, m- gratis medlemmar;
x j, j = 1, …, n- okänd.
Ovanstående system kan skrivas i matrisform: A X = B,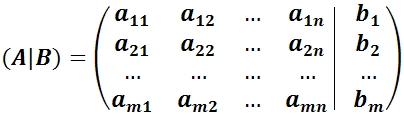

Var ( A|B) är systemets huvudmatris;
A— utökad systemmatris.
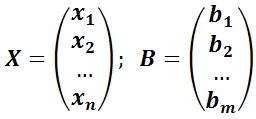
X— kolumn av okända;
B— kolumn med fria medlemmar.
Om matris Bär inte en nollmatris ∅, då kallas detta linjära ekvationssystem inhomogent.
Om matris B= ∅, då kallas detta linjära ekvationssystem homogent. Ett homogent system har alltid en noll (trivial) lösning: x 1 = x 2 = …, x n = 0.
Ledsystem av linjära ekvationerär ett system av linjära ekvationer som har en lösning.
Inkonsekvent system av linjära ekvationerär ett olösligt system av linjära ekvationer.
Ett visst system av linjära ekvationerär ett system av linjära ekvationer som har en unik lösning.
Obestämt system av linjära ekvationerär ett system av linjära ekvationer med ett oändligt antal lösningar. - System med n linjära ekvationer med n okända
Om antalet okända är lika med antalet ekvationer, är matrisen kvadratisk. Determinanten för en matris kallas huvuddeterminanten för ett system av linjära ekvationer och betecknas med symbolen Δ.
Cramer metod för att lösa system n linjära ekvationer med n okänd.
Cramers regel.
Om huvuddeterminanten för ett system med linjära ekvationer inte är lika med noll, är systemet konsekvent och definierat, och den enda lösningen beräknas med Cramer-formlerna:
där Δ i är determinanter erhållna från huvuddeterminanten i systemet Δ genom att ersätta i kolumnen till kolumnen med fria medlemmar. . - System av m linjära ekvationer med n okända
Kronecker-Capelli-satsen.
För att ett givet system av linjära ekvationer ska vara konsekvent är det nödvändigt och tillräckligt att rangordningen för systemmatrisen är lika med rangordningen för systemets utökade matris, rang(Α) = rang(Α|B).
Om rang(Α) ≠ rang(Α|B), då har systemet uppenbarligen inga lösningar.
Om rang(Α) = rang(Α|B), då är två fall möjliga:
1) rank(Α) = n(antal okända) - lösningen är unik och kan erhållas med Cramers formler;
2) rang(Α)< n – det finns oändligt många lösningar. - Gauss metod för att lösa linjära ekvationssystem
Låt oss skapa en utökad matris ( A|B) för ett givet system från koefficienterna för de okända och högra sidorna.
Gaussmetoden eller metoden att eliminera okända består av att reducera den utökade matrisen ( A|B) med hjälp av elementära transformationer över dess rader till en diagonal form (till den övre triangulära formen). Återgå till ekvationssystemet, alla okända bestäms.
Elementära transformationer över strängar inkluderar följande:
1) byta två linjer;
2) multiplicera en sträng med ett annat tal än 0;
3) lägga till ytterligare en sträng till en sträng, multiplicerad med ett godtyckligt tal;
4) kasta ut en nolllinje.
En utökad matris reducerad till diagonal form motsvarar ett linjärt system ekvivalent med det givna, vars lösning inte orsakar svårigheter. . - System av homogena linjära ekvationer.
Ett homogent system har formen:
den motsvarar matrisekvationen A X = 0.
1) Ett homogent system är alltid konsekvent, eftersom r(A) = r(A|B), det finns alltid en nolllösning (0, 0, …, 0).
2) För att ett homogent system ska ha en lösning som inte är noll är det nödvändigt och tillräckligt att r = r(A)< n , vilket är ekvivalent med Δ = 0.
3) Om r< n , då uppenbarligen Δ = 0, då uppstår fria okända c1, c2, …, c n-r, systemet har icke-triviala lösningar, och det finns oändligt många av dem.
4) Allmän lösning X på r< n kan skrivas i matrisform enligt följande:
X = c 1 X 1 + c 2 X 2 + … + c n-r X n-r,
var finns lösningarna X 1, X 2, …, X n-r bilda ett grundläggande system av lösningar.
5) Det grundläggande lösningssystemet kan erhållas från den allmänna lösningen av ett homogent system: ,
,
om vi sekventiellt sätter parametervärdena lika med (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Utvidgning av den allmänna lösningen i termer av det grundläggande lösningssystemetär en registrering av en generell lösning i form av en linjär kombination av lösningar som tillhör grundsystemet.
Sats. För att ett system med linjära homogena ekvationer ska ha en lösning som inte är noll, är det nödvändigt och tillräckligt att Δ ≠ 0.
Så, om determinanten Δ ≠ 0, så har systemet en unik lösning.
Om Δ ≠ 0, så har systemet med linjära homogena ekvationer ett oändligt antal lösningar.
Sats. För att ett homogent system ska ha en lösning som inte är noll är det nödvändigt och tillräckligt att r(A)< n .
Bevis:
1) r det kan inte bli mer n(matrisens rang överstiger inte antalet kolumner eller rader);
2) r< n , därför att Om r = n, då huvuddeterminanten för systemet Δ ≠ 0, och enligt Cramers formler finns det en unik trivial lösning x 1 = x 2 = … = x n = 0, vilket strider mot villkoret. Betyder att, r(A)< n .
Följd. För att få ett homogent system n linjära ekvationer med n okända hade en lösning som inte var noll, det är nödvändigt och tillräckligt att Δ = 0.
System av linjära ekvationer. Föreläsning 6.
System av linjära ekvationer.
Grundläggande koncept.
Visa system
kallad system - linjära ekvationer med okända.
Siffrorna , , kallas systemkoefficienter.
Numren kallas gratis medlemmar i systemet, – systemvariabler. Matris

kallad systemets huvudmatris och matrisen

– utökat matrissystem. Matriser - kolumner
Och motsvarande matriser av fria termer och okända system. Sedan i matrisform kan ekvationssystemet skrivas som . Systemlösning kallas värdena för variabler, vid substitution av vilka alla ekvationer i systemet förvandlas till korrekta numeriska likheter. Vilken lösning som helst på systemet kan representeras som en matriskolumn. Då är matrisjämlikheten sann.
Ekvationssystemet kallas gemensam om den har minst en lösning och icke-fogad om det inte finns någon lösning.
Att lösa ett system med linjära ekvationer innebär att ta reda på om det är konsekvent och i så fall hitta dess allmänna lösning.
Systemet kallas homogen om alla dess fria termer är lika med noll. Ett homogent system är alltid konsekvent, eftersom det har en lösning
Kronecker-Copelli-satsen.
Svaret på frågan om existensen av lösningar på linjära system och deras unika gör att vi kan få följande resultat, som kan formuleras i form av följande påståenden om ett system av linjära ekvationer med okända
 (1)
(1)
Sats 2. System av linjära ekvationer (1) är konsekvent om och endast om rankningen av huvudmatrisen är lika med rankningen av den utökade matrisen (.
Sats 3. Om rangordningen för huvudmatrisen för ett simultant system av linjära ekvationer är lika med antalet okända, så har systemet en unik lösning.
Sats 4. Om rangordningen för huvudmatrisen för ett gemensamt system är mindre än antalet okända, så har systemet ett oändligt antal lösningar.
Regler för att lösa system.
3. Hitta uttrycket för huvudvariablerna i termer av fria och få den allmänna lösningen av systemet.
4. Genom att tilldela godtyckliga värden till fria variabler erhålls alla värden för huvudvariablerna.
Metoder för att lösa linjära ekvationssystem.
Invers matrismetod.

och , dvs systemet har en unik lösning. Låt oss skriva systemet i matrisform
Var  ,
,
.
,
,
.
Låt oss multiplicera båda sidor av matrisekvationen till vänster med matrisen
Sedan får vi , från vilken vi får jämlikheten för att hitta de okända
Exempel 27. Lös ett system av linjära ekvationer med den inversa matrismetoden 
Lösning. Låt oss beteckna med systemets huvudmatris
 .
.
Låt, sedan hittar vi lösningen med hjälp av formeln.
Låt oss räkna.

Sedan har systemet en unik lösning. Låt oss hitta alla algebraiska komplement
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Således
 .
.
Låt oss kolla

 .
.
Den omvända matrisen hittades korrekt. Härifrån hittar vi matrisen av variabler med hjälp av formeln.

 .
.
När vi jämför matrisernas värden får vi svaret: .
Cramers metod.
Låt ett system av linjära ekvationer med okända ges

och , dvs systemet har en unik lösning. Låt oss skriva systemets lösning i matrisform eller

![]()
Låt oss beteckna


. . . . . . . . . . . . . . ,

Således får vi formler för att hitta värdena för okända, som kallas Cramer formler.
![]()
Exempel 28. Lös följande linjära ekvationssystem med Cramermetoden  .
.
Lösning. Låt oss hitta determinanten för systemets huvudmatris
 .
.
Sedan har systemet en unik lösning.
Låt oss hitta de återstående bestämningsfaktorerna för Cramers formler
 ,
,
 ,
,
 .
.
Med hjälp av Cramers formler hittar vi variablernas värden
Gauss metod.
Metoden består av sekventiell eliminering av variabler.
Låt ett system av linjära ekvationer med okända ges.

Den Gaussiska lösningsprocessen består av två steg:
I det första steget reduceras systemets utökade matris, med hjälp av elementära transformationer, till en stegvis form
 ,
,
där , som systemet motsvarar

Efter detta variablerna ![]() anses vara fria och överförs till höger sida i varje ekvation.
anses vara fria och överförs till höger sida i varje ekvation.
I det andra steget uttrycks variabeln från den sista ekvationen och det resulterande värdet ersätts i ekvationen. Från denna ekvation
variabeln uttrycks. Denna process fortsätter tills den första ekvationen. Resultatet är ett uttryck för huvudvariablerna genom fria variabler ![]() .
.
Exempel 29. Lös följande system med Gauss-metoden

Lösning. Låt oss skriva ut systemets utökade matris och föra den till stegvis form

 .
.
Därför att ![]() större än antalet okända, då är systemet konsekvent och har ett oändligt antal lösningar. Låt oss skriva systemet för stegmatrisen
större än antalet okända, då är systemet konsekvent och har ett oändligt antal lösningar. Låt oss skriva systemet för stegmatrisen

Determinanten för den utökade matrisen i detta system, som består av de tre första kolumnerna, är inte lika med noll, så vi anser att den är grundläggande. Variabler
De kommer att vara grundläggande och variabeln kommer att vara gratis. Låt oss flytta det i alla ekvationer till vänster sida

Från den sista ekvationen uttrycker vi
![]()
Genom att ersätta detta värde i den näst sista andra ekvationen får vi
![]()
![]() var
var ![]() . Genom att ersätta variablernas värden och in i den första ekvationen finner vi
. Genom att ersätta variablernas värden och in i den första ekvationen finner vi ![]() . Låt oss skriva svaret i följande formulär
. Låt oss skriva svaret i följande formulär
MED n okänt är ett system av formen:
Var en ij Och b i (i=1,…,m; b=1,…,n)- några kända nummer, och x 1,...,x n- okända nummer. Vid beteckningen av koefficienter en ij index i bestämmer ekvationens nummer och den andra j- numret på det okända där denna koefficient är belägen.
Homogent system - när alla fria termer i systemet är lika med noll ( b 1 = b 2 = … = b m = 0), är den motsatta situationen heterogena system.
Fyrkantigt system - när numret m ekvationer är lika med talet n okänd.
Systemlösning- helhet n tal c 1, c 2, …, c n, sådan substitution av alla c i istället för x i till ett system förvandlar alla dess ekvationer till identiteter.
Ledsystem - när systemet har minst en lösning, och icke-kooperativa systemet när systemet inte har några lösningar.
Ett gemensamt system av denna typ (som ovan, låt det vara (1)) kan ha en eller flera lösningar.
Lösningar c 1 (1) , c 2 (1) , …, c n (1) Och c 1 (2) , c 2 (2) , …, c n (2) gemensamma system av typ (1) kommer att vara olika, när ens en av jämställdheterna inte är uppfyllda:
c 1 (1) = c 1 (2) , c 2 (1) = c 2 (2), …, c n (1) = c n (2) .
Ett gemensamt system av typ (1) blir vissa när hon bara har en lösning; när ett system har minst 2 olika lösningar blir det underbestämd. När det finns fler ekvationer än okända är systemet det omdefinieras.
Koefficienterna för de okända skrivs som en matris:

Det kallas systemets matris.
Siffrorna som visas på höger sida av ekvationerna är b 1,...,b mär gratis medlemmar.
Helhet n tal c 1,...,c när en lösning på detta system när alla ekvationer i systemet blir lika efter att ha ersatt tal i dem c 1,...,c n istället för motsvarande okända x 1,...,x n.
När man löser ett system av linjära ekvationer kan 3 alternativ uppstå:
1. Systemet har bara en lösning.
2. Systemet har ett oändligt antal lösningar. Till exempel, . Lösningen på detta system kommer att vara alla par av tal som skiljer sig i tecken.
3. Systemet har inga lösningar. Till exempel... om det fanns en lösning, då x 1 + x 2 skulle vara lika med 0 och 1 samtidigt.
Metoder för att lösa linjära ekvationssystem.
Direkta metoder ge en algoritm med vilken den exakta lösningen hittas SLAU(system av linjära algebraiska ekvationer). Och om noggrannheten hade varit absolut, skulle de ha hittat den. En riktig elektrisk dator fungerar naturligtvis med ett fel, så lösningen blir ungefärlig.
Många praktiska problem handlar om att lösa system av algebraiska ekvationer av 1:a graden eller, som de brukar kallas, system av linjära ekvationer. Vi kommer att lära oss att lösa alla sådana system utan att ens kräva att antalet ekvationer sammanfaller med antalet okända.
I allmänhet skrivs systemet med linjära ekvationer enligt följande:
Här är siffrorna en ij– odds system, b i – gratis medlemmar, x i– symboler okänd . Det är mycket bekvämt att införa matrisnotation: – huvud matris av systemet, – matris–kolumn av fria termer, – matris–kolumn av okända. Då kan systemet skrivas så här: YXA=B eller mer detaljerat:
Om vi på vänster sida av denna likhet utför matrismultiplikation enligt de vanliga reglerna och likställer elementen i den resulterande kolumnen med elementen I, så kommer vi till den ursprungliga inspelningen av systemet.
Exempel 14. Låt oss skriva samma linjära ekvationssystem på två olika sätt:
Ett system av linjära ekvationer brukar kallas gemensam , om den har minst en lösning, och oförenlig, om det inte finns några lösningar.
I vårt exempel är systemet konsekvent, kolumnen är dess lösning:
Denna lösning kan skrivas utan matriser: x=2, y=1 . Vi kommer att kalla ekvationssystemet osäker , om den har mer än en lösning, och vissa, om det bara finns en lösning.
Exempel 15. Systemet är osäkert. Till exempel är dess lösningar. Läsaren kan hitta många andra lösningar på detta system.
Låt oss först lära oss hur man löser linjära ekvationssystem i ett särskilt fall. Ekvationssystem ÅH=I vi ringer Kramers , om dess huvudmatris A– fyrkantig och icke degenererad. Med andra ord, i Cramer-systemet sammanfaller antalet okända med antalet ekvationer och .
Sats 6. (Cramers regel). Cramer-systemet med linjära ekvationer har en unik lösning som ges av formlerna:
där är determinanten för huvudmatrisen, är determinanten som erhålls från D ersättning i-th kolumn med en kolumn med fria termer.
Kommentar. Cramer-system kan lösas på annat sätt, med hjälp av en invers matris. Låt oss skriva detta system i matrisform: YXA=I. Sedan finns det en invers matris A –1 . Multiplicera matrislikheten med A –1 vänster: A –1 ÅH=A –1 I. Därför att A –1 ÅH=EX=X, då hittas lösningen på systemet: X= A –1 I Vi kommer att kalla denna lösningsmetod matris . Låt oss än en gång betona att det bara är lämpligt för Cramer-system - i andra fall existerar inte den omvända matrisen. Läsaren hittar detaljerade exempel på användningen av matrismetoden och Cramermetoden nedan.
Låt oss slutligen studera det allmänna fallet - systemet m linjära ekvationer med n okänd. För att lösa det, använd Gaussisk metod , som vi kommer att överväga i detalj.För ett godtyckligt system av ekvationer ÅH=I vi skriver ut det expanderat matris. Detta är det vanliga namnet för matrisen som kommer att erhållas om huvudmatrisen A lägg till en kolumn med gratismedlemmar till höger I:
Som när vi beräknar rangen, kommer vi med hjälp av elementära radtransformationer och kolumnpermutationer att reducera vår matris till en trapetsform. I det här fallet kommer naturligtvis ekvationssystemet som motsvarar matrisen att förändras, men det kommer att bli det är likvärdig den ursprungliga (ᴛ.ᴇ. kommer att ha samma lösningar). Faktum är att omarrangering eller tillägg av ekvationer kommer inte att förändra lösningarna. Ordna om kolumner - också: ekvationer x 1+3x2+7x3=4 Och x 1+7x3+3x2=4, självklart är de likvärdiga. Du behöver bara skriva ner vilken okända den givna kolumnen motsvarar. Vi ordnar inte om kolumnen med fria termer - den är vanligtvis separerad från de andra i matrisen med en prickad linje. Nollrader som förekommer i matrisen behöver inte skrivas.
Exempel 1. Lös ekvationssystemet:
Lösning. Låt oss skriva ut den utökade matrisen och reducera den till en trapetsform. Skylt ~ kommer nu att betyda inte bara sammanträffandet av rangordningar, utan också motsvarigheten av motsvarande ekvationssystem.
~ . Låt oss förklara de åtgärder som utförs.
Åtgärd 1. Den första raden lades till den andra raden, multiplicerade den med (–2). Den 1:a raden lades till den 3:e och 4:e raden, multiplicera den med (–3). Syftet med dessa operationer är att få nollor i den första kolumnen, under huvuddiagonalen.
Åtgärd 2. Eftersom vid den diagonala platsen (2,2) finns 0 , jag var tvungen att ordna om den 2:a och 3:e kolumnen. För att komma ihåg denna permutation skrev vi symbolerna för de okända ovanpå.
Åtgärd 3. Den 2:a raden lades till den 3:e raden, multiplicera den med (–2). En 2:a rad lades till den 4:e raden. Målet är att få nollor i den andra kolumnen, under huvuddiagonalen.
Åtgärd 4. Noll linjer kan tas bort.
Så matrisen reduceras till en trapetsform. Hennes rang r=2 . Okänd x 1, x 3- grundläggande; x 2, x 4- fri. Låt oss ge de fria okända godtyckliga värden:
x 2= a, x 4= b.
Här a, b kan vara vilket nummer som helst. Nu från den sista ekvationen i det nya systemet
x 3+x 4= –3
vi hittar x 3: x 3= –3 –b. Att stiga upp, från den första ekvationen
x 1+3x3+2x2+4x4= 5
vi hittar x 1: x 1=5 –3(–3 –b)–2a–4b= 14 –2a–b.
Vi skriver ner den allmänna lösningen:
x 1=14 –2a–b, x 2=a, x 3=–3 –b, x 4=b.
Du kan skriva den allmänna lösningen som en matriskolumn:
För specifika värden a Och b, kan du ta emot privat lösningar. Till exempel när a=0, b=1 vi får: – en av systemets lösningar.
Anteckningar. I den Gaussiska metodalgoritmen såg vi (fall 1), att inkompatibiliteten hos ekvationssystemet är förknippad med diskrepansen i raden av huvudmatrisen och den utökade matrisen. Låt oss presentera följande viktiga teorem utan bevis.
Sats 7 (Kronecker–Capelli). Ett system av linjära ekvationer är konsekvent om och endast om rankningen av huvudmatrisen är lika med rangordningen för den utökade matrisen i systemet.
System av linjära ekvationer - koncept och typer. Klassificering och funktioner för kategorin "System av linjära ekvationer" 2017, 2018.
Så att dess rader (eller kolumner) är linjärt beroende. Låt ett system som innehåller mlineära ekvationer med okända ges: 5.1. Låt oss introducera följande notation. 5.2., - systemets matris - dess utökade matris. - kolumn med gratis medlemmar. - kolumn med okända. Om... .
olinjär optimering (NLO) och vice versa. Påstående om ZNO-problemet: Hitta (8.1) minimum eller maximum i någon domän D. Som vi minns från Math. analys bör partiella derivator sättas lika med noll. Således reducerades ZNO (8.1) till SNL (8.2) (8.2) n olinjära ekvationer. ... .
Föreläsning 15 Betrakta ett inhomogent system (16) Om motsvarande koefficienter för ett homogent system (7) är lika med motsvarande koefficienter för ett inhomogent system (16), så kallas det homogena systemet (7) för motsvarande inhomogena system (16) . Sats. Om... [läs mer] .
7.1 Homogena system av linjära ekvationer. Låt ett homogent system av linjära ekvationer ges (*) Låt oss anta att en uppsättning tal är någon slags lösning på detta system. Då är också taluppsättningen en lösning. Detta kan verifieras genom direkt substitution i systemets ekvationer.... .
Tabell 3 Stadier av ett barns motoriska utveckling Stadium Ålder Indikatorer för motorisk utveckling födelseögonblick upp till 4 månader Bildning av kontroll över huvudets position och möjligheten till dess fria orientering i rymden 4-6 månaders utveckling av den initiala... .
Definition 1. Ett system av linjära ekvationer av formen (1), där fältet kallas ett system av m linjära ekvationer med n okända över fältet, är koefficienterna för de okända, är systemets fria termer (1) ). Definition 2. Ordnat n (), där, kallas en lösning till ett system av linjär... .
Vi rekommenderar också
 Gör-det-själv elektriska ledningar: från diagram till installation
Gör-det-själv elektriska ledningar: från diagram till installation
 Hur man reparerar en badrumskran med dusch
Hur man reparerar en badrumskran med dusch
 Typer av plattor för inklädnad av kaminer och eldstäder
Typer av plattor för inklädnad av kaminer och eldstäder
 Ansluta en diskmaskin - steg-för-steg-instruktioner Så här ansluter du en inbyggd diskmaskin
Ansluta en diskmaskin - steg-för-steg-instruktioner Så här ansluter du en inbyggd diskmaskin
 Utveckling av krökta ytor
Utveckling av krökta ytor
 Skär produkten på materialet
Skär produkten på materialet