Sistem de ecuații. Teorie detaliată cu exemple (2020). Exemple de sisteme de ecuații liniare: metoda soluției Scrierea unei soluții generale la sisteme algebrice liniare omogene și neomogene folosind vectori ai sistemului de soluții fundamentale
Rezolvarea sistemelor de ecuații algebrice liniare (SLAE) este, fără îndoială, cel mai important subiect dintr-un curs de algebră liniară. Un număr mare de probleme din toate ramurile matematicii se rezumă la rezolvarea sistemelor de ecuații liniare. Acești factori explică motivul acestui articol. Materialul articolului este selectat și structurat astfel încât cu ajutorul lui să puteți
- alege metoda optimă pentru rezolvarea sistemului tău de ecuații algebrice liniare,
- studiază teoria metodei alese,
- rezolvați sistemul dvs. de ecuații liniare luând în considerare soluții detaliate la exemple și probleme tipice.
Scurtă descriere a materialului articolului.
În primul rând, dăm toate definițiile, conceptele necesare și introducem notații.
În continuare, vom lua în considerare metode de rezolvare a sistemelor de ecuații algebrice liniare în care numărul de ecuații este egal cu numărul de variabile necunoscute și care au o soluție unică. În primul rând, ne vom concentra pe metoda lui Cramer, în al doilea rând, vom prezenta metoda matriceală pentru rezolvarea unor astfel de sisteme de ecuații, iar în al treilea rând, vom analiza metoda Gauss (metoda eliminării secvențiale a variabilelor necunoscute). Pentru a consolida teoria, cu siguranță vom rezolva mai multe SLAE-uri în moduri diferite.
După aceasta, vom trece la rezolvarea sistemelor de ecuații algebrice liniare de formă generală, în care numărul de ecuații nu coincide cu numărul de variabile necunoscute sau matricea principală a sistemului este singulară. Să formulăm teorema Kronecker-Capelli, care ne permite să stabilim compatibilitatea SLAE-urilor. Să analizăm soluția sistemelor (dacă sunt compatibile) folosind conceptul de bază minoră a unei matrice. Vom lua în considerare și metoda Gauss și vom descrie în detaliu soluțiile exemplelor.
Ne vom opri cu siguranță asupra structurii soluției generale a sistemelor omogene și neomogene de ecuații algebrice liniare. Să dăm conceptul de sistem fundamental de soluții și să arătăm cum este scrisă soluția generală a unui SLAE folosind vectorii sistemului fundamental de soluții. Pentru o mai bună înțelegere, să ne uităm la câteva exemple.
În concluzie, vom lua în considerare sisteme de ecuații care pot fi reduse la cele liniare, precum și diverse probleme în soluția cărora apar SLAE-uri.
Navigare în pagină.
Definiții, concepte, denumiri.
Vom lua în considerare sisteme de p ecuații algebrice liniare cu n variabile necunoscute (p poate fi egal cu n) de forma
Variabile necunoscute, - coeficienți (unele numere reale sau complexe), - termeni liberi (și numere reale sau complexe).
Această formă de înregistrare SLAE se numește coordona.
ÎN formă matriceală Scrierea acestui sistem de ecuații are forma,
Unde  - matricea principală a sistemului, - o matrice coloană de variabile necunoscute, - o matrice coloană de termeni liberi.
- matricea principală a sistemului, - o matrice coloană de variabile necunoscute, - o matrice coloană de termeni liberi.
Dacă adăugăm o coloană matrice de termeni liberi la matricea A ca coloană (n+1), obținem așa-numita matrice extinsă sisteme de ecuații liniare. De obicei, o matrice extinsă este desemnată cu litera T, iar coloana de termeni liberi este separată printr-o linie verticală de coloanele rămase, adică 
Rezolvarea unui sistem de ecuații algebrice liniare numit un set de valori ale variabilelor necunoscute care transformă toate ecuațiile sistemului în identități. Ecuația matriceală pentru valorile date ale variabilelor necunoscute devine, de asemenea, o identitate.
Dacă un sistem de ecuații are cel puțin o soluție, atunci se numește comun.
Dacă un sistem de ecuații nu are soluții, atunci se numește nearticulată.
Dacă un SLAE are o soluție unică, atunci se numește anumit; dacă există mai multe soluții, atunci - incert.
Dacă termenii liberi ai tuturor ecuațiilor sistemului sunt egali cu zero ![]() , atunci sistemul este apelat omogen, in caz contrar - eterogen.
, atunci sistemul este apelat omogen, in caz contrar - eterogen.
Rezolvarea sistemelor elementare de ecuații algebrice liniare.
Dacă numărul de ecuații ale unui sistem este egal cu numărul de variabile necunoscute și determinantul matricei sale principale nu este egal cu zero, atunci astfel de SLAE vor fi numite elementar. Astfel de sisteme de ecuații au o soluție unică, iar în cazul unui sistem omogen, toate variabilele necunoscute sunt egale cu zero.
Am început să studiem astfel de SLAE în liceu. Când le-am rezolvat, am luat o ecuație, am exprimat o variabilă necunoscută în termenii altora și am înlocuit-o în ecuațiile rămase, apoi am luat următoarea ecuație, am exprimat următoarea variabilă necunoscută și am înlocuit-o în alte ecuații și așa mai departe. Sau au folosit metoda adunării, adică au adăugat două sau mai multe ecuații pentru a elimina unele variabile necunoscute. Nu ne vom opri în detaliu asupra acestor metode, deoarece sunt în esență modificări ale metodei Gauss.
Principalele metode de rezolvare a sistemelor elementare de ecuații liniare sunt metoda Cramer, metoda matriceală și metoda Gauss. Să le rezolvăm.
Rezolvarea sistemelor de ecuații liniare folosind metoda lui Cramer.
Să presupunem că trebuie să rezolvăm un sistem de ecuații algebrice liniare 
în care numărul de ecuații este egal cu numărul de variabile necunoscute și determinantul matricei principale a sistemului este diferit de zero, adică .
Fie determinantul matricei principale a sistemului, și ![]() - determinanţi ai matricelor care se obţin din A prin înlocuire 1, 2, …, al n-lea coloana respectiv la coloana de membri liberi:
- determinanţi ai matricelor care se obţin din A prin înlocuire 1, 2, …, al n-lea coloana respectiv la coloana de membri liberi: 
Cu această notație, variabilele necunoscute sunt calculate folosind formulele metodei lui Cramer ca  . Așa se găsește soluția unui sistem de ecuații algebrice liniare folosind metoda lui Cramer.
. Așa se găsește soluția unui sistem de ecuații algebrice liniare folosind metoda lui Cramer.
Exemplu.
metoda lui Cramer  .
.
Soluţie.
Matricea principală a sistemului are forma  . Să calculăm determinantul acestuia (dacă este necesar, vezi articolul):
. Să calculăm determinantul acestuia (dacă este necesar, vezi articolul): 
Deoarece determinantul matricei principale a sistemului este diferit de zero, sistemul are o soluție unică care poate fi găsită prin metoda lui Cramer.
Să compunem și să calculăm determinanții necesari ![]() (obținem determinantul prin înlocuirea primei coloane din matricea A cu o coloană de termeni liberi, determinantul prin înlocuirea celei de-a doua coloane cu o coloană de termeni liberi și prin înlocuirea celei de-a treia coloane a matricei A cu o coloană de termeni liberi) :
(obținem determinantul prin înlocuirea primei coloane din matricea A cu o coloană de termeni liberi, determinantul prin înlocuirea celei de-a doua coloane cu o coloană de termeni liberi și prin înlocuirea celei de-a treia coloane a matricei A cu o coloană de termeni liberi) : 
Găsirea variabilelor necunoscute folosind formule  :
:
Răspuns:
Principalul dezavantaj al metodei lui Cramer (dacă poate fi numită un dezavantaj) este complexitatea calculării determinanților atunci când numărul de ecuații din sistem este mai mare de trei.
Rezolvarea sistemelor de ecuații algebrice liniare folosind metoda matricei (folosind o matrice inversă).
Fie dat un sistem de ecuații algebrice liniare sub formă de matrice, unde matricea A are dimensiunea n cu n și determinantul său este diferit de zero.
Deoarece , matricea A este inversabilă, adică există o matrice inversă. Dacă înmulțim ambele părți ale egalității cu stânga, obținem o formulă pentru găsirea unei matrice-coloană de variabile necunoscute. Așa am obținut o soluție a unui sistem de ecuații algebrice liniare folosind metoda matricei.
Exemplu.
Rezolvarea unui sistem de ecuații liniare metoda matricei.
Soluţie.
Să rescriem sistemul de ecuații sub formă de matrice: 
Deoarece
atunci SLAE poate fi rezolvat folosind metoda matricei. Folosind matricea inversă, soluția acestui sistem poate fi găsită ca  .
.
Să construim o matrice inversă folosind o matrice din adunări algebrice ale elementelor matricei A (dacă este necesar, vezi articolul): 
Rămâne de calculat matricea variabilelor necunoscute prin înmulțirea matricei inverse  la o coloană-matrice de membri liberi (dacă este necesar, vezi articolul):
la o coloană-matrice de membri liberi (dacă este necesar, vezi articolul): 
Răspuns:
 sau într-o altă notație x 1 = 4, x 2 = 0, x 3 = -1.
sau într-o altă notație x 1 = 4, x 2 = 0, x 3 = -1.
Principala problemă la găsirea de soluții la sisteme de ecuații algebrice liniare folosind metoda matricei este complexitatea găsirii matricei inverse, în special pentru matrice pătrată de ordin mai mare decât treimea.
Rezolvarea sistemelor de ecuații liniare folosind metoda Gauss.
Să presupunem că trebuie să găsim o soluție la un sistem de n ecuații liniare cu n variabile necunoscute 
al cărei determinant al matricei principale este diferit de zero.
Esența metodei Gauss constă în excluderea secvențială a variabilelor necunoscute: mai întâi, x 1 este exclus din toate ecuațiile sistemului, începând cu a doua, apoi x 2 este exclus din toate ecuațiile, începând cu a treia, și așa mai departe, până când doar variabila necunoscută x n rămâne în ultima ecuație. Acest proces de transformare a ecuațiilor de sistem pentru a elimina secvențial variabilele necunoscute se numește metoda Gaussiană directă. După finalizarea cursei înainte a metodei gaussiene, se găsește x n din ultima ecuație, folosind această valoare din penultima ecuație, se calculează x n-1 și așa mai departe, se află x 1 din prima ecuație. Procesul de calcul al variabilelor necunoscute la trecerea de la ultima ecuație a sistemului la prima este numit inversa metodei gaussiene.
Să descriem pe scurt algoritmul de eliminare a variabilelor necunoscute.
Vom presupune că , deoarece putem realiza întotdeauna acest lucru prin rearanjarea ecuațiilor sistemului. Să eliminăm variabila necunoscută x 1 din toate ecuațiile sistemului, începând cu a doua. Pentru a face acest lucru, la a doua ecuație a sistemului o adunăm pe prima, înmulțită cu , la a treia ecuație o adunăm pe prima, înmulțită cu , și așa mai departe, la a n-a ecuație o adunăm pe prima, înmulțită cu . Sistemul de ecuații după astfel de transformări va lua forma 
unde si  .
.
Am fi ajuns la același rezultat dacă am fi exprimat x 1 în termenii altor variabile necunoscute în prima ecuație a sistemului și am fi înlocuit expresia rezultată în toate celelalte ecuații. Astfel, variabila x 1 este exclusă din toate ecuațiile, începând cu a doua.
În continuare, procedăm într-un mod similar, dar numai cu o parte din sistemul rezultat, care este marcată în figură 
Pentru a face acest lucru, la a treia ecuație a sistemului o adunăm pe a doua, înmulțită cu , la a patra ecuație o adunăm pe a doua, înmulțită cu , și așa mai departe, la a n-a ecuație o adunăm pe a doua, înmulțită cu . Sistemul de ecuații după astfel de transformări va lua forma 
unde si  . Astfel, variabila x 2 este exclusă din toate ecuațiile, începând cu a treia.
. Astfel, variabila x 2 este exclusă din toate ecuațiile, începând cu a treia.
În continuare, procedăm la eliminarea necunoscutului x 3, în timp ce acționăm similar cu partea de sistem marcată în figură 
Așa că continuăm progresia directă a metodei gaussiene până când sistemul ia forma 
Din acest moment începem inversul metodei gaussiene: calculăm x n din ultima ecuație ca , folosind valoarea obținută a lui x n găsim x n-1 din penultima ecuație, și așa mai departe, găsim x 1 din prima ecuație .
Exemplu.
Rezolvarea unui sistem de ecuații liniare metoda Gauss.
Soluţie.
Să excludem variabila necunoscută x 1 din a doua și a treia ecuație a sistemului. Pentru a face acest lucru, la ambele părți ale celei de-a doua și a treia ecuații adăugăm părțile corespunzătoare ale primei ecuații, înmulțite cu și, respectiv, cu: 
Acum eliminăm x 2 din a treia ecuație adunând la laturile sale stânga și dreapta laturile stânga și dreapta ale celei de-a doua ecuații, înmulțite cu: 
Aceasta completează cursa înainte a metodei Gauss; începem cursa inversă.
Din ultima ecuație a sistemului de ecuații rezultat găsim x 3: 
Din a doua ecuație obținem .
Din prima ecuație găsim variabila necunoscută rămasă și completăm astfel inversul metodei Gauss.
Răspuns:
X 1 = 4, x 2 = 0, x 3 = -1.
Rezolvarea sistemelor de ecuații algebrice liniare de formă generală.
În general, numărul de ecuații ale sistemului p nu coincide cu numărul de variabile necunoscute n:
Astfel de SLAE-uri pot să nu aibă soluții, să aibă o singură soluție sau să aibă infinite de soluții. Această afirmație se aplică și sistemelor de ecuații a căror matrice principală este pătrată și singulară.
Teorema Kronecker–Capelli.
Înainte de a găsi o soluție la un sistem de ecuații liniare, este necesar să se stabilească compatibilitatea acestuia. Răspunsul la întrebarea când SLAE este compatibil și când este inconsecvent este dat de Teorema Kronecker–Capelli:
Pentru ca un sistem de p ecuații cu n necunoscute (p poate fi egal cu n) să fie consistent, este necesar și suficient ca rangul matricei principale a sistemului să fie egal cu rangul matricei extinse, adică , Rang(A)=Rang(T).
Să luăm în considerare, ca exemplu, aplicarea teoremei Kronecker–Capelli pentru a determina compatibilitatea unui sistem de ecuații liniare.
Exemplu.
Aflați dacă sistemul de ecuații liniare are  solutii.
solutii.
Soluţie.
 . Să folosim metoda limitării minorilor. Minor de ordinul doi
. Să folosim metoda limitării minorilor. Minor de ordinul doi  diferit de zero. Să ne uităm la minorii de ordinul trei care se învecinează cu acesta:
diferit de zero. Să ne uităm la minorii de ordinul trei care se învecinează cu acesta: 
Deoarece toți minorii învecinați de ordinul al treilea sunt egali cu zero, rangul matricei principale este egal cu doi.
La rândul său, rangul matricei extinse  este egal cu trei, întrucât minorul este de ordinul trei
este egal cu trei, întrucât minorul este de ordinul trei 
diferit de zero.
Prin urmare, Rang(A), prin urmare, folosind teorema Kronecker–Capelli, putem concluziona că sistemul original de ecuații liniare este inconsecvent.
Răspuns:
Sistemul nu are soluții.
Deci, am învățat să stabilim inconsistența unui sistem folosind teorema Kronecker-Capelli.
Dar cum să găsești o soluție la un SLAE dacă compatibilitatea acestuia este stabilită?
Pentru a face acest lucru, avem nevoie de conceptul de bază minoră a unei matrice și de o teoremă despre rangul unei matrice.
Se numește minorul de ordinul cel mai înalt al matricei A, diferit de zero de bază.
Din definiția unei baze minore rezultă că ordinea acesteia este egală cu rangul matricei. Pentru o matrice A diferită de zero pot exista mai multe baze minore; există întotdeauna o bază minoră.
De exemplu, luați în considerare matricea  .
.
Toate minorele de ordinul trei ale acestei matrice sunt egale cu zero, deoarece elementele celui de-al treilea rând al acestei matrice sunt suma elementelor corespunzătoare din primul și al doilea rând.
Următorii minori de ordinul doi sunt de bază, deoarece sunt diferit de zero 
Minorii  nu sunt de bază, deoarece sunt egale cu zero.
nu sunt de bază, deoarece sunt egale cu zero.
Teorema rangului matricei.
Dacă rangul unei matrice de ordinul p cu n este egal cu r, atunci toate elementele de rând (și coloană) ale matricei care nu formează baza minoră aleasă sunt exprimate liniar în termenii elementelor de rând (și coloană) corespunzătoare care formează baza minoră.
Ce ne spune teorema rangului matricei?
Dacă, conform teoremei Kronecker–Capelli, am stabilit compatibilitatea sistemului, atunci alegem orice bază minoră a matricei principale a sistemului (ordinea acesteia este egală cu r) și excludem din sistem toate ecuațiile care nu nu formează baza selectată minoră. SLAE obținut în acest fel va fi echivalent cu cel inițial, deoarece ecuațiile aruncate sunt încă redundante (conform teoremei rangului matricei, ele sunt o combinație liniară a ecuațiilor rămase).
Ca rezultat, după eliminarea ecuațiilor inutile ale sistemului, sunt posibile două cazuri.
Dacă numărul de ecuații r din sistemul rezultat este egal cu numărul de variabile necunoscute, atunci acesta va fi definit și singura soluție poate fi găsită prin metoda Cramer, metoda matricei sau metoda Gauss.
Exemplu.
 .
.
Soluţie.
Rangul matricei principale a sistemului  este egal cu doi, deoarece minorul este de ordinul doi
este egal cu doi, deoarece minorul este de ordinul doi  diferit de zero. Rang matrice extins
diferit de zero. Rang matrice extins  este, de asemenea, egal cu doi, deoarece singurul minor de ordinul trei este zero
este, de asemenea, egal cu doi, deoarece singurul minor de ordinul trei este zero 
iar minorul de ordinul doi considerat mai sus este diferit de zero. Pe baza teoremei Kronecker–Capelli, putem afirma compatibilitatea sistemului original de ecuații liniare, deoarece Rank(A)=Rank(T)=2.
Ca bază minoră luăm . Este format din coeficienții primei și celei de-a doua ecuații: 
A treia ecuație a sistemului nu participă la formarea bazei minore, așa că o excludem din sistemul bazat pe teorema privind rangul matricei: 
Așa am obținut un sistem elementar de ecuații algebrice liniare. Să o rezolvăm folosind metoda lui Cramer: 
Răspuns:
x 1 = 1, x 2 = 2.
Dacă numărul de ecuații r din SLAE rezultat este mai mic decât numărul de variabile necunoscute n, atunci în partea stângă a ecuațiilor lăsăm termenii care formează baza minori și transferăm termenii rămași în partea dreaptă a ecuațiilor. ecuații ale sistemului cu semnul opus.
Se numesc variabilele necunoscute (r dintre ele) rămase în partea stângă a ecuațiilor principal.
Se numesc variabile necunoscute (există n - r piese) care sunt în partea dreaptă gratuit.
Acum credem că variabilele necunoscute libere pot lua valori arbitrare, în timp ce principalele r variabile necunoscute vor fi exprimate prin variabile necunoscute libere într-un mod unic. Expresia lor poate fi găsită prin rezolvarea SLAE rezultată folosind metoda Cramer, metoda matricei sau metoda Gauss.
Să ne uităm la asta cu un exemplu.
Exemplu.
Rezolvați un sistem de ecuații algebrice liniare  .
.
Soluţie.
Să găsim rangul matricei principale a sistemului  prin metoda limitării minorilor. Să luăm un 1 1 = 1 ca un minor diferit de zero de ordinul întâi. Să începem să căutăm un minor diferit de zero de ordinul doi care se învecinează cu acest minor:
prin metoda limitării minorilor. Să luăm un 1 1 = 1 ca un minor diferit de zero de ordinul întâi. Să începem să căutăm un minor diferit de zero de ordinul doi care se învecinează cu acest minor: 
Așa am găsit un minor non-zero de ordinul doi. Să începem să căutăm un minor de ordinul al treilea care nu se limitează la zero: 
Astfel, rangul matricei principale este de trei. Rangul matricei extinse este, de asemenea, egal cu trei, adică sistemul este consecvent.
Luăm ca bază minorul non-zero găsit de ordinul al treilea.
Pentru claritate, arătăm elementele care formează baza minoră: 
Lăsăm termenii implicați în baza minoră în partea stângă a ecuațiilor sistemului și transferăm restul cu semne opuse în partea dreaptă: 
Să dăm variabilelor necunoscute libere x 2 și x 5 valori arbitrare, adică acceptăm ![]() , unde sunt numere arbitrare. În acest caz, SLAE va lua forma
, unde sunt numere arbitrare. În acest caz, SLAE va lua forma 
Să rezolvăm sistemul elementar rezultat de ecuații algebrice liniare folosind metoda lui Cramer: 
Prin urmare, .
În răspunsul dvs., nu uitați să indicați variabile necunoscute gratuite.
Răspuns:
Unde sunt numerele arbitrare.
Rezuma.
Pentru a rezolva un sistem de ecuații algebrice liniare generale, determinăm mai întâi compatibilitatea acestuia folosind teorema Kronecker–Capelli. Dacă rangul matricei principale nu este egal cu rangul matricei extinse, atunci ajungem la concluzia că sistemul este incompatibil.
Dacă rangul matricei principale este egal cu rangul matricei extinse, atunci selectăm o bază minoră și renunțăm la ecuațiile sistemului care nu participă la formarea bazei minore selectate.
Dacă ordinea bazei minore este egală cu numărul de variabile necunoscute, atunci SLAE are o soluție unică, care poate fi găsită prin orice metodă cunoscută de noi.
Dacă ordinea bazei minore este mai mică decât numărul de variabile necunoscute, atunci în partea stângă a ecuațiilor sistemului lăsăm termenii cu principalele variabile necunoscute, transferăm termenii rămași în partea dreaptă și dăm valori arbitrare pentru variabilele necunoscute libere. Din sistemul de ecuații liniare rezultat găsim principalele variabile necunoscute folosind metoda Cramer, metoda matricei sau metoda Gauss.
Metoda Gauss pentru rezolvarea sistemelor de ecuații algebrice liniare de formă generală.
Metoda Gauss poate fi folosită pentru a rezolva sisteme de ecuații algebrice liniare de orice fel fără a le testa mai întâi pentru consistență. Procesul de eliminare secvențială a variabilelor necunoscute face posibilă tragerea unei concluzii atât despre compatibilitatea, cât și despre incompatibilitatea SLAE, iar dacă există o soluție, face posibilă găsirea acesteia.
Din punct de vedere computațional, metoda Gaussiană este de preferat.
Vezi descrierea detaliată a acesteia și exemplele analizate în articolul Metoda Gauss pentru rezolvarea sistemelor de ecuații algebrice liniare generale.
Scrierea unei soluții generale la sisteme algebrice liniare omogene și neomogene folosind vectori ai sistemului fundamental de soluții.
În această secțiune vom vorbi despre sisteme omogene și neomogene simultane de ecuații algebrice liniare care au un număr infinit de soluții.
Să ne ocupăm mai întâi de sisteme omogene.
Sistem fundamental de soluții sistem omogen de p ecuații algebrice liniare cu n variabile necunoscute este o colecție de (n – r) soluții liniar independente ale acestui sistem, unde r este ordinul bazei minore a matricei principale a sistemului.
Dacă notăm soluții liniar independente ale unui SLAE omogen ca X (1) , X (2) , …, X (n-r) (X (1) , X (2) , …, X (n-r) sunt matrici coloane de dimensiunea n prin 1) , atunci soluția generală a acestui sistem omogen este reprezentată ca o combinație liniară de vectori ai sistemului fundamental de soluții cu coeficienți constanți arbitrari C 1, C 2, ..., C (n-r), adică .
Ce înseamnă termenul de soluție generală a unui sistem omogen de ecuații algebrice liniare (oroslau)?
Semnificația este simplă: formula specifică toate soluțiile posibile ale SLAE inițial, cu alte cuvinte, luând orice set de valori ale constantelor arbitrare C 1, C 2, ..., C (n-r), folosind formula pe care o vom obțineți una dintre soluțiile SLAE omogen original.
Astfel, dacă găsim un sistem fundamental de soluții, atunci putem defini toate soluțiile acestui SLAE omogen ca .
Să arătăm procesul de construire a unui sistem fundamental de soluții la un SLAE omogen.
Selectăm baza minoră a sistemului original de ecuații liniare, excludem toate celelalte ecuații din sistem și transferăm toți termenii care conțin variabile necunoscute libere în partea dreaptă a ecuațiilor sistemului cu semne opuse. Să dăm variabilelor necunoscute libere valorile 1,0,0,...,0 și să calculăm principalele necunoscute prin rezolvarea sistemului elementar rezultat de ecuații liniare în orice mod, de exemplu, folosind metoda Cramer. Aceasta va avea ca rezultat X (1) - prima soluție a sistemului fundamental. Dacă dăm necunoscutelor libere valorile 0,1,0,0,…,0 și calculăm principalele necunoscute, obținem X (2) . Și așa mai departe. Dacă atribuim valorile 0,0,…,0,1 variabilelor necunoscute libere și calculăm principalele necunoscute, obținem X (n-r) . În acest fel, se va construi un sistem fundamental de soluții la un SLAE omogen și soluția sa generală poate fi scrisă sub forma .
Pentru sistemele neomogene de ecuații algebrice liniare, soluția generală este reprezentată sub forma , unde este soluția generală a sistemului omogen corespunzător și este soluția particulară a SLAE neomogen original, pe care o obținem dând necunoscutelor libere valorile 0,0,…,0 și calcularea valorilor principalelor necunoscute.
Să ne uităm la exemple.
Exemplu.
Aflați sistemul fundamental de soluții și soluția generală a unui sistem omogen de ecuații algebrice liniare  .
.
Soluţie.
Rangul matricei principale a sistemelor omogene de ecuații liniare este întotdeauna egal cu rangul matricei extinse. Să găsim rangul matricei principale folosind metoda limitării minorilor. Ca un minor non-zero de ordinul întâi, luăm elementul a 1 1 = 9 din matricea principală a sistemului. Să găsim minorul care se limitează la zero de ordinul doi: 
A fost găsit un minor de ordinul doi, diferit de zero. Să trecem prin minorii de ordinul trei care se învecinează cu acesta în căutarea unuia diferit de zero: 
Toți minorii de ordinul trei sunt egali cu zero, prin urmare, rangul matricei principale și extinse este egal cu doi. Hai sa luam . Pentru claritate, să notăm elementele sistemului care îl formează: 
A treia ecuație a SLAE inițial nu participă la formarea bazei minore, prin urmare, poate fi exclusă: 
Lăsăm termenii care conțin principalele necunoscute în partea dreaptă a ecuațiilor și transferăm termenii cu necunoscute libere în partea dreaptă:
Să construim un sistem fundamental de soluții la sistemul omogen original de ecuații liniare. Sistemul fundamental de soluții al acestui SLAE constă din două soluții, deoarece SLAE original conține patru variabile necunoscute, iar ordinea bazei sale minore este egală cu două. Pentru a găsi X (1), dăm variabilelor necunoscute libere valorile x 2 = 1, x 4 = 0, apoi găsim principalele necunoscute din sistemul de ecuații  .
.
- Sisteme m ecuații liniare cu n necunoscut.
Rezolvarea unui sistem de ecuații liniare- acesta este un astfel de set de numere ( x 1 , x 2 , …, x n), atunci când sunt substituite în fiecare dintre ecuațiile sistemului, se obține egalitatea corectă.
Unde a ij , i = 1, …, m; j = 1, …, n— coeficienții sistemului;
b i , i = 1, …, m- membri gratuiti;
x j , j = 1, …, n- necunoscut.
Sistemul de mai sus poate fi scris sub formă de matrice: A X = B,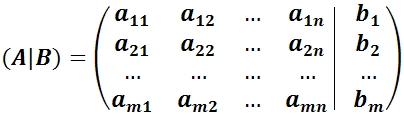

Unde ( A|B) este matricea principală a sistemului;
A— matrice de sistem extinsă;
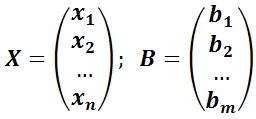
X— coloana de necunoscute;
B— coloana de membri liberi.
Dacă matricea B nu este o matrice nulă ∅, atunci acest sistem de ecuații liniare se numește neomogen.
Dacă matricea B= ∅, atunci acest sistem de ecuații liniare se numește omogen. Un sistem omogen are întotdeauna o soluție zero (trivială): x 1 = x 2 = …, x n = 0.
Sistem comun de ecuații liniare este un sistem de ecuații liniare care are o soluție.
Sistem inconsecvent de ecuații liniare este un sistem nerezolvabil de ecuații liniare.
Un anumit sistem de ecuații liniare este un sistem de ecuații liniare care are o soluție unică.
Sistem nedefinit de ecuații liniare este un sistem de ecuații liniare cu un număr infinit de soluții. - Sisteme de n ecuații liniare cu n necunoscute
Dacă numărul de necunoscute este egal cu numărul de ecuații, atunci matricea este pătrată. Determinantul unei matrice este numit principalul determinant al unui sistem de ecuații liniare și este notat cu simbolul Δ.
Metoda Cramer pentru rezolvarea sistemelor n ecuații liniare cu n necunoscut.
regula lui Cramer.
Dacă determinantul principal al unui sistem de ecuații liniare nu este egal cu zero, atunci sistemul este consistent și definit, iar singura soluție este calculată folosind formulele Cramer:
unde Δ i sunt determinanţi obţinuţi din determinantul principal al sistemului Δ prin înlocuire i a coloana la coloana membrilor liberi. . - Sisteme de m ecuații liniare cu n necunoscute
Teorema Kronecker–Capelli.
Pentru ca un anumit sistem de ecuații liniare să fie consistent, este necesar și suficient ca rangul matricei sistemului să fie egal cu rangul matricei extinse a sistemului, song(Α) = song(Α|B).
Dacă song(Α) ≠ song(Α|B), atunci sistemul evident nu are soluții.
Dacă song(Α) = song(Α|B), atunci sunt posibile două cazuri:
1) rang(Α) = n(număr de necunoscute) - soluția este unică și poate fi obținută folosind formulele lui Cramer;
2) rang (Α)< n - există infinit de multe soluții. - metoda Gauss pentru rezolvarea sistemelor de ecuații liniare
Să creăm o matrice extinsă ( A|B) a unui sistem dat din coeficienții necunoscutelor și părților din dreapta.
Metoda Gaussiană sau metoda eliminării necunoscutelor constă în reducerea matricei extinse ( A|B) folosind transformări elementare peste rândurile sale la o formă diagonală (la forma triunghiulară superioară). Revenind la sistemul de ecuații, toate necunoscutele sunt determinate.
Transformările elementare peste șiruri includ următoarele:
1) schimbați două linii;
2) înmulțirea unui șir cu un alt număr decât 0;
3) adăugarea unui alt șir la un șir, înmulțit cu un număr arbitrar;
4) aruncarea unei linii zero.
O matrice extinsă redusă la formă diagonală corespunde unui sistem liniar echivalent cu cel dat, a cărui soluție nu provoacă dificultăți. . - Sistem de ecuații liniare omogene.
Un sistem omogen are forma:
corespunde ecuației matriceale A X = 0.
1) Un sistem omogen este întotdeauna consistent, deoarece r(A) = r(A|B), există întotdeauna o soluție zero (0, 0, …, 0).
2) Pentru ca un sistem omogen să aibă o soluție diferită de zero este necesar și suficient ca r = r(A)< n , care este echivalent cu Δ = 0.
3) Dacă r< n , atunci evident Δ = 0, atunci apar necunoscute libere c 1 , c 2 , …, c n-r, sistemul are soluții non-triviale și există o infinitate de ele.
4) Soluție generală X la r< n poate fi scris sub formă de matrice după cum urmează:
X = c 1 X 1 + c 2 X 2 + … + c n-r X n-r,
unde sunt solutiile X 1, X 2, …, X n-r formează un sistem fundamental de soluții.
5) Sistemul fundamental de soluții poate fi obținut din soluția generală a unui sistem omogen: ,
,
dacă setăm succesiv valorile parametrilor egale cu (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Extinderea soluției generale în ceea ce privește sistemul fundamental de soluții este o înregistrare a unei soluții generale sub forma unei combinații liniare de soluții aparținând sistemului fundamental.
Teorema. Pentru ca un sistem de ecuații liniare omogene să aibă o soluție diferită de zero, este necesar și suficient ca Δ ≠ 0.
Deci, dacă determinantul Δ ≠ 0, atunci sistemul are o soluție unică.
Dacă Δ ≠ 0, atunci sistemul de ecuații liniare omogene are un număr infinit de soluții.
Teorema. Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r(A)< n .
Dovada:
1) r nu poate fi mai mult n(rangul matricei nu depășește numărul de coloane sau rânduri);
2) r< n , deoarece Dacă r = n, atunci determinantul principal al sistemului Δ ≠ 0 și, conform formulelor lui Cramer, există o soluție trivială unică x 1 = x 2 = … = x n = 0, ceea ce contrazice condiția. Mijloace, r(A)< n .
Consecinţă. Pentru un sistem omogen n ecuații liniare cu n necunoscutele au avut o soluție diferită de zero, este necesar și suficient ca Δ = 0.
Sisteme de ecuații liniare. Cursul 6.
Sisteme de ecuații liniare.
Noțiuni de bază.
Vizualizare sistem
numit sistem - ecuații liniare cu necunoscute.
Numerele , , sunt numite coeficienții sistemului.
Numerele sunt numite membri liberi ai sistemului, – variabile de sistem. Matrice

numit matricea principală a sistemului, și matricea

– sistem de matrice extinsă. Matrici - coloane
Și în mod corespunzător matrice de termeni liberi și necunoscute ale sistemului. Apoi, sub formă de matrice, sistemul de ecuații poate fi scris ca . Soluție de sistem se numește valorile variabilelor, la înlocuirea cărora, toate ecuațiile sistemului se transformă în egalități numerice corecte. Orice soluție a sistemului poate fi reprezentată ca o coloană-matrice. Atunci egalitatea matricei este adevărată.
Sistemul de ecuații se numește comun dacă are cel puţin o soluţie şi nearticulată daca nu exista solutie.
Rezolvarea unui sistem de ecuații liniare înseamnă a afla dacă este consecvent și, dacă da, a găsi soluția lui generală.
Sistemul este numit omogen dacă toți termenii săi liberi sunt egali cu zero. Un sistem omogen este întotdeauna consistent, deoarece are o soluție
Teorema Kronecker-Copelli.
Răspunsul la întrebarea existenței soluțiilor la sisteme liniare și unicitatea acestora ne permite să obținem următorul rezultat, care poate fi formulat sub forma următoarelor afirmații referitoare la un sistem de ecuații liniare cu necunoscute
 (1)
(1)
Teorema 2. Sistemul de ecuații liniare (1) este consistent dacă și numai dacă rangul matricei principale este egal cu rangul matricei extinse (.
Teorema 3. Dacă rangul matricei principale a unui sistem simultan de ecuații liniare este egal cu numărul de necunoscute, atunci sistemul are o soluție unică.
Teorema 4. Dacă rangul matricei principale a unui sistem comun este mai mic decât numărul de necunoscute, atunci sistemul are un număr infinit de soluții.
Reguli pentru rezolvarea sistemelor.
3. Aflați expresia variabilelor principale în termeni de cele libere și obțineți soluția generală a sistemului.
4. Prin atribuirea de valori arbitrare variabilelor libere se obțin toate valorile variabilelor principale.
Metode de rezolvare a sistemelor de ecuații liniare.
Metoda matricei inverse.

și , adică sistemul are o soluție unică. Să scriem sistemul sub formă de matrice
Unde  ,
,
.
,
,
.
Să înmulțim ambele părți ale ecuației matriceale din stânga cu matricea
Deoarece , obținem , din care obținem egalitatea pentru găsirea necunoscutelor
Exemplul 27. Rezolvați un sistem de ecuații liniare folosind metoda matricei inverse 
Soluţie. Să notăm prin matricea principală a sistemului
 .
.
Fie, atunci găsim soluția folosind formula.
Să calculăm.

Din , atunci sistemul are o soluție unică. Să găsim toate complementele algebrice
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Prin urmare
 .
.
Sa verificam

 .
.
Matricea inversă a fost găsită corect. De aici, folosind formula, găsim matricea de variabile.

 .
.
Comparând valorile matricelor, obținem răspunsul: .
metoda lui Cramer.
Să fie dat un sistem de ecuații liniare cu necunoscute

și , adică sistemul are o soluție unică. Să scriem soluția sistemului sub formă de matrice sau

![]()
Să notăm


. . . . . . . . . . . . . . ,

Astfel, obținem formule pentru găsirea valorilor necunoscutelor, care sunt numite Formule Cramer.
![]()
Exemplul 28. Rezolvați următorul sistem de ecuații liniare folosind metoda Cramer  .
.
Soluţie. Să găsim determinantul matricei principale a sistemului
 .
.
Din , atunci sistemul are o soluție unică.
Să găsim determinanții rămași pentru formulele lui Cramer
 ,
,
 ,
,
 .
.
Folosind formulele lui Cramer găsim valorile variabilelor
metoda Gauss.
Metoda constă în eliminarea secvenţială a variabilelor.
Să fie dat un sistem de ecuații liniare cu necunoscute.

Procesul de soluție Gaussian constă din două etape:
În prima etapă, matricea extinsă a sistemului este redusă, folosind transformări elementare, la o formă în trepte.
 ,
,
unde , căruia îi corespunde sistemul

După aceasta variabilele ![]() sunt considerate libere și sunt transferate în partea dreaptă în fiecare ecuație.
sunt considerate libere și sunt transferate în partea dreaptă în fiecare ecuație.
În a doua etapă, variabila este exprimată din ultima ecuație, iar valoarea rezultată este substituită în ecuație. Din această ecuație
variabila este exprimată. Acest proces continuă până la prima ecuație. Rezultatul este o expresie a principalelor variabile prin variabile libere ![]() .
.
Exemplul 29. Rezolvați următorul sistem folosind metoda Gauss

Soluţie. Să scriem matricea extinsă a sistemului și să o aducem în formă treptat

 .
.
Deoarece ![]() mai mare decât numărul de necunoscute, atunci sistemul este consistent și are un număr infinit de soluții. Să scriem sistemul pentru matricea pasilor
mai mare decât numărul de necunoscute, atunci sistemul este consistent și are un număr infinit de soluții. Să scriem sistemul pentru matricea pasilor

Determinantul matricei extinse a acestui sistem, compus din primele trei coloane, nu este egal cu zero, deci îl considerăm de bază. Variabile
Acestea vor fi de bază, iar variabila va fi liberă. Să-l mutăm în toate ecuațiile în partea stângă

Din ultima ecuație pe care o exprimăm
![]()
Înlocuind această valoare în penultima a doua ecuație, obținem
![]()
![]() Unde
Unde ![]() . Înlocuind valorile variabilelor și în prima ecuație, găsim
. Înlocuind valorile variabilelor și în prima ecuație, găsim ![]() . Să scriem răspunsul în forma următoare
. Să scriem răspunsul în forma următoare
CU n necunoscut este un sistem de forma:
Unde a ijȘi b i (i=1,…,m; b=1,…,n)- câteva numere cunoscute și x 1 ,…,x n- numere necunoscute. În desemnarea coeficienţilor a ij index i determină numărul ecuației, iar al doilea j- numărul necunoscutului la care se află acest coeficient.
sistem omogen - când toți termenii liberi ai sistemului sunt egali cu zero ( b 1 = b 2 = … = b m = 0), situația inversă este sistem eterogen.
sistem pătrat - când numărul m ecuații este egal cu numărul n necunoscut.
Soluție de sistem- totalitate n numere c 1, c 2, …, c n, astfel încât înlocuirea tuturor c iîn loc de x iîntr-un sistem își transformă toate ecuațiile în identități.
Sistem articular - când sistemul are cel puțin 1 soluție și sistem non-cooperativ când sistemul nu are soluții.
Un sistem de îmbinări de acest tip (cum este prezentat mai sus, să fie (1)) poate avea una sau mai multe soluții.
Soluții c 1 (1) , c 2 (1) , …, c n (1)Și c 1 (2) , c 2 (2) , …, c n (2) sistemele de îmbinare de tip (1) vor fi variat, când nici măcar 1 dintre egalități nu este satisfăcută:
c 1 (1) = c 1 (2) , c 2 (1) = c 2 (2) , …, c n (1) = c n (2) .
Un sistem comun de tip (1) va fi anumit când are o singură soluție; când un sistem are cel puțin 2 soluții diferite, acesta devine subdeterminat. Când există mai multe ecuații decât necunoscute, sistemul este redefinit.
Coeficienții pentru necunoscute se scriu ca o matrice:

Se numeste matricea sistemului.
Numerele care apar în partea dreaptă a ecuațiilor sunt b 1 ,…,b m sunt membri liberi.
Totalitate n numere c 1 ,…,c n este o soluție a acestui sistem atunci când toate ecuațiile sistemului devin egale după înlocuirea numerelor din ele c 1 ,…,c nîn locul necunoscutelor corespunzătoare x 1 ,…,x n.
La rezolvarea unui sistem de ecuații liniare pot apărea 3 opțiuni:
1. Sistemul are o singură soluție.
2. Sistemul are un număr infinit de soluții. De exemplu, . Soluția acestui sistem va fi toate perechile de numere care diferă ca semn.
3. Sistemul nu are soluții. De exemplu... dacă a existat o soluție, atunci x 1 + x 2 ar fi egal cu 0 și 1 în același timp.
Metode de rezolvare a sistemelor de ecuații liniare.
Metode directe dați un algoritm prin care se găsește soluția exactă SLAU(sisteme de ecuații algebrice liniare). Și dacă acuratețea ar fi fost absolută, ar fi găsit-o. Un computer electric real, desigur, funcționează cu o eroare, așa că soluția va fi aproximativă.
Multe probleme practice se reduc la rezolvarea sistemelor de ecuații algebrice de gradul I sau, așa cum se numesc de obicei, sisteme de ecuații liniare. Vom învăța să rezolvăm orice astfel de sisteme fără a cere măcar ca numărul de ecuații să coincidă cu numărul de necunoscute.
În general, sistemul de ecuații liniare se scrie după cum urmează:
Iată numerele a ij– cote sisteme, b i – membri gratuiti, x i– simboluri necunoscut . Este foarte convenabil să introduceți notația matriceală: – principal matricea sistemului, – matricea–coloana de termeni liberi, – matricea–coloana de necunoscute. Apoi sistemul poate fi scris astfel: TOPOR=B sau, mai detaliat:
Dacă în partea stângă a acestei egalități efectuăm înmulțirea matricei conform regulilor uzuale și echivalăm elementele coloanei rezultate cu elementele ÎN, apoi vom ajunge la înregistrarea originală a sistemului.
Exemplul 14. Să scriem același sistem de ecuații liniare în două moduri diferite:
Un sistem de ecuații liniare este de obicei numit comun , dacă are cel puțin o soluție, și incompatibil, daca nu exista solutii.
În exemplul nostru, sistemul este consistent, coloana este soluția sa:
Această soluție poate fi scrisă fără matrice: X=2, y=1 . Vom numi sistemul de ecuații incert , în cazul în care are mai multe soluții, și anumit, daca exista o singura solutie.
Exemplul 15. Sistemul este incert. De exemplu, sunt soluțiile sale. Cititorul poate găsi multe alte soluții la acest sistem.
Să învățăm cum să rezolvăm mai întâi sistemele de ecuații liniare într-un anumit caz. Sistem de ecuații OH=ÎN vom suna a lui Kramer , dacă matricea sa principală A– pătrate și nedegenerate. Cu alte cuvinte, în sistemul Cramer numărul de necunoscute coincide cu numărul de ecuații și .
Teorema 6. (regula lui Cramer). Sistemul de ecuații liniare Cramer are o soluție unică dată de formulele:
unde este determinantul matricei principale, este determinantul obtinut din Dînlocuire i-a coloană cu o coloană de termeni liberi.
Cometariu. Sistemele Cramer pot fi rezolvate într-un alt mod, folosind o matrice inversă. Să scriem acest sistem sub formă de matrice: TOPOR=ÎN. Deoarece , atunci există o matrice inversă A –1 . Înmulțiți egalitatea matricei cu A –1 stânga: A –1 OH=A –1 ÎN. Deoarece A –1 OH=EX=X, atunci se găsește soluția sistemului: X= A –1 ÎN Vom numi această metodă de soluție matrice . Să subliniem încă o dată că este potrivit doar pentru sistemele Cramer - în alte cazuri matricea inversă nu există. Cititorul va găsi mai jos exemple detaliate de utilizare a metodei matrice și a metodei Cramer.
Să studiem în sfârșit cazul general - sistemul m ecuații liniare cu n necunoscut. Pentru a o rezolva, folosiți metoda gaussiana , pe care o vom lua în considerare în detaliu.Pentru un sistem arbitrar de ecuații OH=ÎN o vom scrie extins matrice. Acesta este numele obișnuit pentru matricea care va fi obținută dacă matricea principală A adăugați o coloană de membri liberi în dreapta ÎN:
Ca și în cazul calculării rangului, folosind transformări elementare de rând și permutări de coloane ne vom reduce matricea la o formă trapezoidală. În acest caz, desigur, sistemul de ecuații corespunzător matricei se va schimba, dar va fi este echivalent cel original (ᴛ.ᴇ. va avea aceleași soluții). De fapt, rearanjarea sau adăugarea de ecuații nu va schimba soluțiile. Rearanjarea coloanelor - de asemenea: ecuații x 1+3x2+7x3=4 Și x 1+7x3+3x2=4, bineinteles ca sunt echivalente. Trebuie doar să scrieți cărei necunoscute îi corespunde coloana dată. Nu rearanjam coloana de termeni liberi - de obicei este separată de ceilalți din matrice printr-o linie punctată. Nu este necesar să fie scrise zero rânduri care apar în matrice.
Exemplul 1. Rezolvați sistemul de ecuații:
Soluţie. Să scriem matricea extinsă și să o reducem la o formă trapezoidală. Semn ~ va însemna acum nu numai coincidența de ranguri, ci și echivalența sistemelor de ecuații corespunzătoare.
~ . Să explicăm acțiunile efectuate.
Acțiunea 1. Prima linie a fost adăugată la a doua linie, înmulțind-o cu (–2). Prima linie a fost adăugată la rândurile a 3-a și a 4-a, înmulțind-o cu (–3). Scopul acestor operații este de a obține zerouri în prima coloană, sub diagonala principală.
Acțiunea 2. Deoarece la locul diagonal (2,2) există 0 , a trebuit să rearanjez coloana a 2-a și a 3-a. Pentru a ne aminti această permutare, am scris deasupra simbolurile necunoscutelor.
Acțiunea 3. A doua linie a fost adăugată la a treia linie, înmulțind-o cu (–2). O a doua linie a fost adăugată la a patra linie. Scopul este de a obține zerouri în a doua coloană, sub diagonala principală.
Acțiunea 4. Liniile zero pot fi eliminate.
Deci, matricea este redusă la o formă trapezoidală. Rangul ei r=2 . Necunoscut x 1, x 3– de bază; x 2, x 4- gratuit. Să dăm necunoscutelor libere valori arbitrare:
x 2= a, x 4= b.
Aici a, b poate fi orice număr. Acum de la ultima ecuație a noului sistem
x 3+x 4= –3
găsim x 3: x 3= –3 –b. Ridicându-se, din prima ecuație
x 1+3x 3+2x 2+4x 4= 5
găsim x 1: x 1=5 –3(–3 –b)–2a–4b= 14 –2a–b.
Scriem soluția generală:
x 1=14 –2a–b, x 2=a, x 3=–3 –b, x 4=b.
Puteți scrie soluția generală ca o coloană-matrice:
Pentru valori specifice AȘi b, puteți primi privat solutii. De exemplu, când A=0, b=1 obţinem: – una dintre soluţiile sistemului.
Note.În algoritmul metodei Gauss am văzut (cazul 1), că incompatibilitatea sistemului de ecuații este asociată cu discrepanța în rândurile matricelor principale și extinse. Să prezentăm următoarea teoremă importantă fără demonstrație.
Teorema 7 (Kronecker–Capelli). Un sistem de ecuații liniare este consistent dacă și numai dacă rangul matricei principale este egal cu rangul matricei extinse a sistemului.
Sisteme de ecuații liniare - concept și tipuri. Clasificarea și caracteristicile categoriei „Sisteme de ecuații liniare” 2017, 2018.
Astfel încât rândurile (sau coloanele) să fie dependente liniar. Să fie dat un sistem care conține ecuații mliniare cu necunoscute: 5.1. Să introducem următoarea notație. 5.2., - matricea sistemului - matricea sa extinsă. - coloana de membri liberi. - coloana de necunoscute. Dacă... .
optimizare neliniară (NLO) și invers. Enunțul problemei ZNO: Găsiți (8.1) minimul sau maximul într-un domeniu D. După cum ne amintim din Math. analiza, derivatele parțiale ar trebui să fie egale cu zero. Astfel, ZNO (8.1) a fost redus la SNL (8.2) (8.2) n ecuații neliniare. ... .
Cursul 15 Considerăm un sistem neomogen (16) Dacă coeficienții corespunzători ai unui sistem omogen (7) sunt egali cu coeficienții corespunzători ai unui sistem neomogen (16), atunci sistemul omogen (7) se numește sistem neomogen corespunzător (16) . Teorema. Dacă... [citește mai mult] .
7.1 Sisteme omogene de ecuații liniare. Să fie dat un sistem omogen de ecuații liniare (*) Să presupunem că o mulțime de numere este un fel de soluție a acestui sistem. Atunci și mulțimea numerelor este o soluție. Acest lucru poate fi verificat prin substituție directă în ecuațiile sistemului.... .
Tabelul 3 Etapele dezvoltării motorii a copilului Stadiul Vârsta Indicatori ai dezvoltării motorii momentul nașterii până la 4 luni Formarea controlului asupra poziției capului și posibilitatea orientării libere a acestuia în spațiu 4-6 luni dezvoltarea inițială... .
Definiție 1. Un sistem de ecuații liniare de forma (1), unde, câmpul se numește sistem de m ecuații liniare cu n necunoscute peste câmp, sunt coeficienții necunoscutelor, sunt termenii liberi ai sistemului (1 ). Definiție 2. Ordonat n (), unde, se numește soluție a unui sistem de... liniar.
De asemenea, vă recomandăm
 Instrucțiuni detaliate pentru restaurarea unui scaun cu cotiere din lemn
Instrucțiuni detaliate pentru restaurarea unui scaun cu cotiere din lemn
 Gunoiul în slujba artei: meșteșuguri originale DIY din materiale reciclate
Gunoiul în slujba artei: meșteșuguri originale DIY din materiale reciclate
 Cum să alegi un cuptor electric încorporat - instrucțiuni pentru o achiziție profitabilă Cum să alegi un cuptor electric încorporat
Cum să alegi un cuptor electric încorporat - instrucțiuni pentru o achiziție profitabilă Cum să alegi un cuptor electric încorporat
 Cadru cu mecanism pentru canapea pat pliant francez
Cadru cu mecanism pentru canapea pat pliant francez
 Distanțe standard dintre un cazan pe gaz și o sobă pe gaz Distanța de la un cazan montat la o sobă pe gaz
Distanțe standard dintre un cazan pe gaz și o sobă pe gaz Distanța de la un cazan montat la o sobă pe gaz
 Documente de reglementare Distanța de la contorul de gaz la aragazul standard
Documente de reglementare Distanța de la contorul de gaz la aragazul standard