Gleichungssystem. Detaillierte Theorie mit Beispielen (2020). Beispiele für lineare Gleichungssysteme: Lösungsmethode Schreiben einer allgemeinen Lösung homogener und inhomogener linearer algebraischer Systeme unter Verwendung von Vektoren des fundamentalen Lösungssystems
Das Lösen linearer algebraischer Gleichungssysteme (SLAE) ist zweifellos das wichtigste Thema des Kurses Lineare Algebra. Eine Vielzahl von Problemen aus allen Bereichen der Mathematik reduzieren sich auf die Lösung linearer Gleichungssysteme. Diese Faktoren erklären den Grund für die Erstellung dieses Artikels. Das Material des Artikels ist so ausgewählt und strukturiert, dass Sie es mit seiner Hilfe tun können
- Wählen Sie die optimale Methode zur Lösung Ihres Systems linearer algebraischer Gleichungen.
- die Theorie der gewählten Methode studieren,
- Lösen Sie Ihr lineares Gleichungssystem, indem Sie die Lösungen typischer Beispiele und Probleme im Detail betrachten.
Kurze Beschreibung des Materials des Artikels.
Zunächst geben wir alle notwendigen Definitionen und Konzepte und führen einige Notationen ein.
Als nächstes betrachten wir Methoden zur Lösung linearer algebraischer Gleichungssysteme, bei denen die Anzahl der Gleichungen gleich der Anzahl unbekannter Variablen ist und die eine eindeutige Lösung haben. Konzentrieren wir uns zunächst auf die Cramer-Methode, zweitens zeigen wir die Matrixmethode zur Lösung solcher Gleichungssysteme und drittens analysieren wir die Gauß-Methode (die Methode der sukzessiven Eliminierung unbekannter Variablen). Um die Theorie zu festigen, werden wir auf jeden Fall mehrere SLAEs auf unterschiedliche Weise lösen.
Danach gehen wir zur Lösung von Systemen linearer algebraischer Gleichungen allgemeiner Form über, bei denen die Anzahl der Gleichungen nicht mit der Anzahl der unbekannten Variablen übereinstimmt oder die Hauptmatrix des Systems entartet ist. Lassen Sie uns das Kronecker-Capelli-Theorem formulieren, mit dem wir die Kompatibilität von SLAE feststellen können. Analysieren wir die Lösung von Systemen (im Falle ihrer Kompatibilität) anhand des Konzepts der Basis Minor einer Matrix. Wir werden auch die Gauß-Methode betrachten und die Lösungen der Beispiele ausführlich beschreiben.
Achten Sie darauf, auf die Struktur der allgemeinen Lösung homogener und inhomogener Systeme linearer algebraischer Gleichungen einzugehen. Geben wir das Konzept eines fundamentalen Lösungssystems und zeigen wir, wie die allgemeine Lösung des SLAE unter Verwendung der Vektoren des fundamentalen Lösungssystems geschrieben wird. Zum besseren Verständnis schauen wir uns einige Beispiele an.
Abschließend betrachten wir auf lineare Gleichungssysteme reduzierte Gleichungssysteme sowie verschiedene Probleme, bei deren Lösung SLAEs entstehen.
Seitennavigation.
Definitionen, Konzepte, Bezeichnungen.
Wir betrachten Systeme von p linearen algebraischen Gleichungen mit n unbekannten Variablen (p kann gleich n sein) der Form
Unbekannte Variablen, - Koeffizienten (einige reelle oder komplexe Zahlen), - freie Mitglieder (auch reelle oder komplexe Zahlen).
Diese Form von SLAE heißt Koordinate.
IN Matrixform Dieses Gleichungssystem hat die Form:
Wo  - die Hauptmatrix des Systems, - die Matrixspalte unbekannter Variablen, - die Matrixspalte freier Mitglieder.
- die Hauptmatrix des Systems, - die Matrixspalte unbekannter Variablen, - die Matrixspalte freier Mitglieder.
Wenn wir der Matrix A als (n + 1)-te Spalte die Matrixspalte freier Terme hinzufügen, erhalten wir die sogenannte erweiterte Matrix Systeme linearer Gleichungen. Normalerweise wird die erweiterte Matrix mit dem Buchstaben T bezeichnet und die Spalte der freien Elemente wird durch eine vertikale Linie vom Rest der Spalten getrennt, d. h. 
Durch Lösen eines Systems linearer algebraischer Gleichungen eine Menge von Werten unbekannter Variablen genannt, die alle Gleichungen des Systems in Identitäten umwandelt. Auch die Matrixgleichung für die gegebenen Werte der unbekannten Variablen wird zu einer Identität.
Wenn ein Gleichungssystem mindestens eine Lösung hat, heißt es gemeinsam.
Wenn das Gleichungssystem keine Lösungen hat, heißt es unvereinbar.
Wenn ein SLAE eine eindeutige Lösung hat, wird es aufgerufen bestimmt; wenn es mehr als eine Lösung gibt, dann - unsicher.
Wenn die freien Terme aller Gleichungen des Systems gleich Null sind ![]() , dann wird das System aufgerufen homogen, sonst - heterogen.
, dann wird das System aufgerufen homogen, sonst - heterogen.
Lösung elementarer Systeme linearer algebraischer Gleichungen.
Wenn die Anzahl der Systemgleichungen gleich der Anzahl der unbekannten Variablen ist und die Determinante ihrer Hauptmatrix ungleich Null ist, dann nennen wir solche SLAEs elementar. Solche Gleichungssysteme haben eine eindeutige Lösung, und im Fall eines homogenen Systems sind alle unbekannten Variablen gleich Null.
Wir haben in der High School begonnen, solche SLAE zu studieren. Als wir sie lösten, nahmen wir eine Gleichung, drückten eine unbekannte Variable durch andere aus und setzten sie in die übrigen Gleichungen ein, dann nahmen wir die nächste Gleichung, drückten die nächste unbekannte Variable aus und setzten sie in andere Gleichungen ein und so weiter. Oder sie verwendeten die Additionsmethode, das heißt, sie fügten zwei oder mehr Gleichungen hinzu, um einige unbekannte Variablen zu eliminieren. Wir werden nicht näher auf diese Methoden eingehen, da es sich im Wesentlichen um Modifikationen der Gauß-Methode handelt.
Die wichtigsten Methoden zur Lösung elementarer linearer Gleichungssysteme sind die Cramer-Methode, die Matrixmethode und die Gauß-Methode. Sortieren wir sie.
Lösen linearer Gleichungssysteme nach der Cramer-Methode.
Wir müssen ein System linearer algebraischer Gleichungen lösen 
in dem die Anzahl der Gleichungen gleich der Anzahl der unbekannten Variablen ist und die Determinante der Hauptmatrix des Systems von Null verschieden ist, also .
Sei die Determinante der Hauptmatrix des Systems und ![]() sind Determinanten von Matrizen, die man aus A durch Ersetzen erhält 1., 2., …, n Spalte bzw. zur Spalte der freien Mitglieder:
sind Determinanten von Matrizen, die man aus A durch Ersetzen erhält 1., 2., …, n Spalte bzw. zur Spalte der freien Mitglieder: 
Mit einer solchen Notation werden die unbekannten Variablen nach den Formeln der Cramer-Methode berechnet als  . Auf diese Weise wird die Lösung eines Systems linearer algebraischer Gleichungen mit der Cramer-Methode gefunden.
. Auf diese Weise wird die Lösung eines Systems linearer algebraischer Gleichungen mit der Cramer-Methode gefunden.
Beispiel.
Cramer-Methode  .
.
Lösung.
Die Hauptmatrix des Systems hat die Form  . Berechnen Sie seine Determinante (siehe ggf. den Artikel):
. Berechnen Sie seine Determinante (siehe ggf. den Artikel): 
Da die Determinante der Hauptmatrix des Systems von Null verschieden ist, verfügt das System über eine einzigartige Lösung, die mit der Cramer-Methode gefunden werden kann.
Stellen Sie die notwendigen Determinanten zusammen und berechnen Sie sie ![]() (Die Determinante erhält man durch Ersetzen der ersten Spalte in Matrix A durch eine Spalte mit freien Elementen, die Determinante – durch Ersetzen der zweiten Spalte durch eine Spalte mit freien Elementen, – durch Ersetzen der dritten Spalte von Matrix A durch eine Spalte mit freien Elementen ):
(Die Determinante erhält man durch Ersetzen der ersten Spalte in Matrix A durch eine Spalte mit freien Elementen, die Determinante – durch Ersetzen der zweiten Spalte durch eine Spalte mit freien Elementen, – durch Ersetzen der dritten Spalte von Matrix A durch eine Spalte mit freien Elementen ): 
Unbekannte Variablen mithilfe von Formeln finden  :
:
Antwort:
Der Hauptnachteil der Cramer-Methode (wenn man sie überhaupt als Nachteil bezeichnen kann) ist die Komplexität der Berechnung der Determinanten, wenn die Anzahl der Systemgleichungen mehr als drei beträgt.
Lösen von Systemen linearer algebraischer Gleichungen mit der Matrixmethode (unter Verwendung der inversen Matrix).
Das System linearer algebraischer Gleichungen sei in Matrixform gegeben, wobei die Matrix A die Dimension n mal n hat und ihre Determinante ungleich Null ist.
Da ist die Matrix A invertierbar, d. h. es gibt eine inverse Matrix. Wenn wir beide Teile der Gleichheit mit links multiplizieren, erhalten wir eine Formel zum Ermitteln der Spaltenmatrix unbekannter Variablen. Wir haben also die Lösung des Systems linearer algebraischer Gleichungen durch die Matrixmethode erhalten.
Beispiel.
System linearer Gleichungen lösen Matrixmethode.
Lösung.
Schreiben wir das Gleichungssystem in Matrixform um: 
Als
dann kann SLAE mit der Matrixmethode gelöst werden. Mit der inversen Matrix kann die Lösung dieses Systems gefunden werden als  .
.
Erstellen wir eine inverse Matrix unter Verwendung einer Matrix algebraischer Komplemente der Elemente der Matrix A (siehe ggf. den Artikel): 
Es bleibt noch zu berechnen - die Matrix unbekannter Variablen durch Multiplikation der inversen Matrix  zur Matrix-Spalte der freien Mitglieder (siehe ggf. den Artikel):
zur Matrix-Spalte der freien Mitglieder (siehe ggf. den Artikel): 
Antwort:
 oder in einer anderen Notation x 1 = 4, x 2 = 0, x 3 = -1.
oder in einer anderen Notation x 1 = 4, x 2 = 0, x 3 = -1.
Das Hauptproblem beim Finden von Lösungen für Systeme linearer algebraischer Gleichungen mit der Matrixmethode ist die Komplexität des Findens der inversen Matrix, insbesondere für quadratische Matrizen mit einer höheren Ordnung als der dritten.
Lösen linearer Gleichungssysteme nach der Gauß-Methode.
Angenommen, wir müssen eine Lösung für ein System aus n linearen Gleichungen mit n unbekannten Variablen finden 
deren Determinante von Null verschieden ist.
Die Essenz der Gauß-Methode besteht im sukzessiven Ausschluss unbekannter Variablen: Zuerst wird x 1 aus allen Gleichungen des Systems ausgeschlossen, beginnend mit der zweiten, dann wird x 2 aus allen Gleichungen ausgeschlossen, beginnend mit der dritten usw., bis nur noch die unbekannte Variable vorhanden ist x n bleibt in der letzten Gleichung. Ein solcher Prozess der Transformation der Gleichungen des Systems zur sukzessiven Eliminierung unbekannter Variablen wird aufgerufen direkte Gauß-Methode. Nach Abschluss des Vorwärtslaufs der Gaußschen Methode wird x n aus der letzten Gleichung ermittelt, x n-1 wird aus der vorletzten Gleichung unter Verwendung dieses Werts berechnet usw., x 1 wird aus der ersten Gleichung ermittelt. Der Prozess der Berechnung unbekannter Variablen beim Übergang von der letzten Gleichung des Systems zur ersten wird aufgerufen umgekehrte Gauß-Methode.
Beschreiben wir kurz den Algorithmus zur Eliminierung unbekannter Variablen.
Wir gehen davon aus, dass wir dies immer erreichen können, indem wir die Gleichungen des Systems neu ordnen. Wir schließen die unbekannte Variable x 1 aus allen Gleichungen des Systems aus, beginnend mit der zweiten. Dazu addieren Sie die erste Gleichung multipliziert mit zur zweiten Gleichung des Systems, addieren die erste multipliziert mit zur dritten Gleichung und so weiter, addieren die erste multipliziert mit zur n-ten Gleichung. Das Gleichungssystem wird nach solchen Transformationen die Form annehmen 
wo ein  .
.
Wir würden zum gleichen Ergebnis kommen, wenn wir x 1 durch andere unbekannte Variablen in der ersten Gleichung des Systems ausdrücken und den resultierenden Ausdruck in alle anderen Gleichungen einsetzen würden. Somit wird die Variable x 1 ab der zweiten aus allen Gleichungen ausgeschlossen.
Als nächstes gehen wir ähnlich vor, allerdings nur mit einem Teil des resultierenden Systems, der in der Abbildung markiert ist 
Dazu addieren Sie die Sekunde multipliziert mit zur dritten Gleichung des Systems, addieren die Sekunde multipliziert mit zur vierten Gleichung und so weiter, addieren die Sekunde multipliziert mit zur n-ten Gleichung. Das Gleichungssystem wird nach solchen Transformationen die Form annehmen 
wo ein  . Somit wird die Variable x 2 ab der dritten aus allen Gleichungen ausgeschlossen.
. Somit wird die Variable x 2 ab der dritten aus allen Gleichungen ausgeschlossen.
Als nächstes fahren wir mit der Eliminierung der Unbekannten x 3 fort und verfahren dabei ähnlich mit dem in der Abbildung markierten Teil des Systems 
Wir setzen also den direkten Verlauf der Gauß-Methode fort, bis das System die Form annimmt 
Von diesem Moment an beginnen wir mit dem umgekehrten Ablauf der Gauß-Methode: Wir berechnen x n aus der letzten Gleichung als , mit dem erhaltenen Wert x n ermitteln wir x n-1 aus der vorletzten Gleichung und so weiter ermitteln wir x 1 aus der ersten Gleichung.
Beispiel.
System linearer Gleichungen lösen Gaußsche Methode.
Lösung.
Lassen Sie uns die unbekannte Variable x 1 aus der zweiten und dritten Gleichung des Systems ausschließen. Dazu addieren wir zu beiden Teilen der zweiten und dritten Gleichung die entsprechenden Teile der ersten Gleichung, multipliziert mit bzw. mit: 
Jetzt schließen wir x 2 aus der dritten Gleichung aus, indem wir zu seinem linken und rechten Teil den linken und rechten Teil der zweiten Gleichung addieren, multipliziert mit: 
Damit ist der Vorwärtskurs der Gauß-Methode abgeschlossen, wir beginnen den Rückwärtskurs.
Aus der letzten Gleichung des resultierenden Gleichungssystems finden wir x 3: 
Aus der zweiten Gleichung erhalten wir .
Aus der ersten Gleichung ermitteln wir die verbleibende unbekannte Variable und damit ist der umgekehrte Verlauf der Gauß-Methode abgeschlossen.
Antwort:
X 1 \u003d 4, x 2 \u003d 0, x 3 \u003d -1.
Lösen von Systemen linearer algebraischer Gleichungen allgemeiner Form.
Im allgemeinen Fall stimmt die Anzahl der Gleichungen des Systems p nicht mit der Anzahl der unbekannten Variablen n überein:
Solche SLAEs haben möglicherweise keine Lösungen, eine einzige Lösung oder unendlich viele Lösungen. Diese Aussage gilt auch für Gleichungssysteme, deren Hauptmatrix quadratisch und entartet ist.
Kronecker-Capelli-Theorem.
Bevor eine Lösung für ein lineares Gleichungssystem gefunden werden kann, muss dessen Kompatibilität festgestellt werden. Die Antwort auf die Frage, wann SLAE kompatibel und wann inkompatibel ist, lautet: Kronecker-Capelli-Theorem:
Damit ein System von p Gleichungen mit n Unbekannten (p kann gleich n sein) kompatibel ist, ist es notwendig und ausreichend, dass der Rang der Hauptmatrix des Systems gleich dem Rang der erweiterten Matrix ist, d. h. Rang( A)=Rang(T) .
Betrachten wir als Beispiel die Anwendung des Kronecker-Cappelli-Theorems zur Bestimmung der Kompatibilität eines linearen Gleichungssystems.
Beispiel.
Finden Sie heraus, ob das lineare Gleichungssystem vorhanden ist  Lösungen.
Lösungen.
Lösung.
 . Lassen Sie uns die Methode der Grenzüberschreitung bei Minderjährigen anwenden. Moll zweiter Ordnung
. Lassen Sie uns die Methode der Grenzüberschreitung bei Minderjährigen anwenden. Moll zweiter Ordnung  verschieden von Null. Schauen wir uns die damit verbundenen Minderjährigen dritter Ordnung an:
verschieden von Null. Schauen wir uns die damit verbundenen Minderjährigen dritter Ordnung an: 
Da alle angrenzenden Minderjährigen dritter Ordnung gleich Null sind, ist der Rang der Hauptmatrix zwei.
Im Gegenzug der Rang der erweiterten Matrix  ist gleich drei, da das Moll dritter Ordnung ist
ist gleich drei, da das Moll dritter Ordnung ist 
verschieden von Null.
Auf diese Weise, Rang(A) , daher können wir nach dem Kronecker-Capelli-Theorem schlussfolgern, dass das ursprüngliche System linearer Gleichungen inkonsistent ist.
Antwort:
Es gibt kein Lösungssystem.
Wir haben also gelernt, die Inkonsistenz des Systems mithilfe des Kronecker-Capelli-Theorems festzustellen.
Aber wie findet man die Lösung des SLAE, wenn seine Kompatibilität festgestellt ist?
Dazu benötigen wir das Konzept der Basis Minor einer Matrix und den Satz über den Rang einer Matrix.
Der Minor höchster Ordnung der Matrix A außer Null wird aufgerufen Basic.
Aus der Definition der Basis Minor folgt, dass ihre Ordnung gleich dem Rang der Matrix ist. Für eine Nicht-Null-Matrix A kann es mehrere Basis-Minor-Matrix geben; es gibt immer eine Basis-Minor-Matrix.
Betrachten Sie zum Beispiel die Matrix  .
.
Alle Minderjährigen dritter Ordnung dieser Matrix sind gleich Null, da die Elemente der dritten Zeile dieser Matrix die Summe der entsprechenden Elemente der ersten und zweiten Zeile sind.
Die folgenden Minderjährigen zweiter Ordnung sind einfach, da sie ungleich Null sind 
Minderjährige  sind nicht grundlegend, da sie gleich Null sind.
sind nicht grundlegend, da sie gleich Null sind.
Matrixrangsatz.
Wenn der Rang einer Matrix der Ordnung p mal n r ist, werden alle Elemente der Zeilen (und Spalten) der Matrix, die nicht die gewählte Basis Minor bilden, linear durch die entsprechenden Elemente der Zeilen (und Spalten) ausgedrückt ), die das Grundmoll bilden.
Was sagt uns der Matrixrangsatz?
Wenn wir mit dem Kronecker-Capelli-Theorem die Kompatibilität des Systems festgestellt haben, wählen wir eine beliebige grundlegende Nebenmatrix der Hauptmatrix des Systems (ihre Ordnung ist gleich r) und schließen alle Gleichungen aus dem System aus, die dies nicht tun bilden das gewählte Grund-Nebenfach. Der auf diese Weise erhaltene SLAE entspricht dem ursprünglichen, da die verworfenen Gleichungen immer noch redundant sind (gemäß dem Matrixrangsatz handelt es sich um eine Linearkombination der verbleibenden Gleichungen).
Infolgedessen sind nach dem Verwerfen der übermäßigen Gleichungen des Systems zwei Fälle möglich.
Wenn die Anzahl der Gleichungen r im resultierenden System gleich der Anzahl der unbekannten Variablen ist, dann ist es eindeutig und die einzige Lösung kann mit der Cramer-Methode, der Matrixmethode oder der Gauß-Methode gefunden werden.
Beispiel.
 .
.
Lösung.
Rang der Hauptmatrix des Systems  ist gleich zwei, da das Moll zweiter Ordnung ist
ist gleich zwei, da das Moll zweiter Ordnung ist  verschieden von Null. Erweiterter Matrixrang
verschieden von Null. Erweiterter Matrixrang  ist ebenfalls gleich zwei, da das einzige Moll dritter Ordnung gleich Null ist
ist ebenfalls gleich zwei, da das einzige Moll dritter Ordnung gleich Null ist 
und das oben betrachtete Moll zweiter Ordnung ist von Null verschieden. Basierend auf dem Kronecker-Capelli-Theorem kann man die Kompatibilität des ursprünglichen linearen Gleichungssystems behaupten, da Rank(A)=Rank(T)=2 .
Als Basis-Moll nehmen wir . Sie wird durch die Koeffizienten der ersten und zweiten Gleichung gebildet: 
Die dritte Gleichung des Systems ist nicht an der Bildung des Basis-Minor beteiligt, daher schließen wir sie basierend auf dem Matrix-Rang-Theorem aus dem System aus: 
Damit haben wir ein elementares System linearer algebraischer Gleichungen erhalten. Lösen wir es mit der Cramer-Methode: 
Antwort:
x 1 = 1, x 2 = 2.
Wenn die Anzahl der Gleichungen r im resultierenden SLAE kleiner ist als die Anzahl der unbekannten Variablen n, dann belassen wir die Terme, die den grundlegenden Minor bilden, in den linken Teilen der Gleichungen und übertragen die verbleibenden Terme auf die rechten Teile der Gleichungen des Systems mit umgekehrtem Vorzeichen.
Die auf der linken Seite der Gleichungen verbleibenden unbekannten Variablen (es gibt r davon) werden aufgerufen hauptsächlich.
Unbekannte Variablen (es gibt n - r davon), die auf der rechten Seite gelandet sind, werden aufgerufen frei.
Nun gehen wir davon aus, dass die freien unbekannten Variablen beliebige Werte annehmen können, während die r wichtigsten unbekannten Variablen auf einzigartige Weise durch die freien unbekannten Variablen ausgedrückt werden. Ihr Ausdruck kann durch Lösen des resultierenden SLAE mit der Cramer-Methode, der Matrixmethode oder der Gauß-Methode ermittelt werden.
Nehmen wir ein Beispiel.
Beispiel.
Lösen Sie das System linearer algebraischer Gleichungen  .
.
Lösung.
Finden Sie den Rang der Hauptmatrix des Systems  nach der Bordering-Minor-Methode. Nehmen wir a 1 1 = 1 als einen Moll erster Ordnung ungleich Null. Beginnen wir mit der Suche nach einem Moll zweiter Ordnung ungleich Null, das dieses Moll umgibt:
nach der Bordering-Minor-Methode. Nehmen wir a 1 1 = 1 als einen Moll erster Ordnung ungleich Null. Beginnen wir mit der Suche nach einem Moll zweiter Ordnung ungleich Null, das dieses Moll umgibt: 
Wir haben also ein Moll zweiter Ordnung ungleich Null gefunden. Beginnen wir mit der Suche nach einem ungleich Null angrenzenden Moll dritter Ordnung: 
Somit beträgt der Rang der Hauptmatrix drei. Der Rang der erweiterten Matrix beträgt ebenfalls drei, das heißt, das System ist konsistent.
Das gefundene Nicht-Null-Moll dritter Ordnung wird als Basis genommen.
Der Übersichtlichkeit halber zeigen wir die Elemente, die das Basis-Moll bilden: 
Wir belassen die am Basis-Minor beteiligten Terme auf der linken Seite der Gleichungen des Systems und übertragen den Rest mit entgegengesetzten Vorzeichen auf die rechten Seiten: 
Wir geben den freien unbekannten Variablen x 2 und x 5 beliebige Werte, das heißt, wir nehmen ![]() , wo sind beliebige Zahlen. In diesem Fall nimmt die SLAE die Form an
, wo sind beliebige Zahlen. In diesem Fall nimmt die SLAE die Form an 
Wir lösen das erhaltene Elementarsystem linearer algebraischer Gleichungen nach der Cramer-Methode: 
Somit, .
Vergessen Sie nicht, in der Antwort freie unbekannte Variablen anzugeben.
Antwort:
Wo sind beliebige Zahlen?
Zusammenfassen.
Um ein System linearer algebraischer Gleichungen allgemeiner Form zu lösen, ermitteln wir zunächst seine Kompatibilität mithilfe des Kronecker-Capelli-Theorems. Wenn der Rang der Hauptmatrix nicht dem Rang der erweiterten Matrix entspricht, schließen wir daraus, dass das System inkonsistent ist.
Wenn der Rang der Hauptmatrix gleich dem Rang der erweiterten Matrix ist, wählen wir den Basis-Minor und verwerfen die Gleichungen des Systems, die nicht an der Bildung des gewählten Basis-Minor beteiligt sind.
Wenn die Ordnung der Basis Minor gleich der Anzahl unbekannter Variablen ist, dann hat das SLAE eine eindeutige Lösung, die mit jeder uns bekannten Methode gefunden werden kann.
Wenn die Ordnung der Basis kleiner ist als die Anzahl der unbekannten Variablen, dann belassen wir die Terme mit den wichtigsten unbekannten Variablen auf der linken Seite der Gleichungen des Systems, übertragen die restlichen Terme auf die rechten Seiten und weisen beliebige Werte zu zu den freien unbekannten Variablen. Aus dem resultierenden linearen Gleichungssystem ermitteln wir die wichtigsten unbekannten Variablen nach der Cramer-Methode, der Matrixmethode oder der Gauß-Methode.
Gauß-Methode zur Lösung linearer algebraischer Gleichungssysteme allgemeiner Form.
Mit der Gauß-Methode kann man Systeme linearer algebraischer Gleichungen jeglicher Art lösen, ohne sie vorher auf Kompatibilität prüfen zu müssen. Der Prozess der sukzessiven Eliminierung unbekannter Variablen ermöglicht es, sowohl auf die Kompatibilität als auch auf die Inkonsistenz des SLAE Rückschlüsse zu ziehen und, sofern eine Lösung vorliegt, diese zu finden.
Aus rechnerischer Sicht ist die Gaußsche Methode vorzuziehen.
Eine ausführliche Beschreibung und analysierte Beispiele finden Sie im Artikel Gauß-Methode zur Lösung linearer algebraischer Gleichungssysteme allgemeiner Form.
Aufnahme der allgemeinen Lösung homogener und inhomogener linearer algebraischer Systeme unter Verwendung der Vektoren des fundamentalen Lösungssystems.
In diesem Abschnitt konzentrieren wir uns auf gemeinsame homogene und inhomogene Systeme linearer algebraischer Gleichungen, die unendlich viele Lösungen haben.
Befassen wir uns zunächst mit homogenen Systemen.
Grundlegendes Entscheidungssystem Ein homogenes System p linearer algebraischer Gleichungen mit n unbekannten Variablen ist eine Menge von (n – r) linear unabhängigen Lösungen dieses Systems, wobei r die Ordnung der Basisminor der Hauptmatrix des Systems ist.
Wenn wir linear unabhängige Lösungen eines homogenen SLAE als X (1) , X (2) , …, X (n-r) bezeichnen, sind (X (1) , X (2) , …, durch 1 ) , dann wird die allgemeine Lösung dieses homogenen Systems als lineare Kombination von Vektoren des fundamentalen Lösungssystems mit beliebigen konstanten Koeffizienten С 1 , С 2 , …, С (n-r) dargestellt, d. h. .
Was bedeutet der Begriff allgemeine Lösung eines homogenen Systems linearer algebraischer Gleichungen (Oroslau)?
Die Bedeutung ist einfach: Die Formel gibt alle möglichen Lösungen des ursprünglichen SLAE an, d erhält eine der Lösungen des ursprünglichen homogenen SLAE.
Wenn wir also ein grundlegendes Lösungssystem finden, können wir alle Lösungen dieses homogenen SLAE als festlegen.
Lassen Sie uns den Prozess der Konstruktion eines grundlegenden Lösungssystems für ein homogenes SLAE zeigen.
Wir wählen den Basis-Minor des ursprünglichen Systems linearer Gleichungen, schließen alle anderen Gleichungen aus dem System aus und übertragen auf die rechte Seite der Gleichungen des Systems mit entgegengesetzten Vorzeichen alle Terme, die freie unbekannte Variablen enthalten. Geben wir den freien unbekannten Variablen die Werte 1,0,0,…,0 und berechnen wir die Hauptunbekannten, indem wir das resultierende elementare System linearer Gleichungen auf irgendeine Weise lösen, beispielsweise nach der Cramer-Methode. Somit wird X (1) erhalten – die erste Lösung des Fundamentalsystems. Wenn wir den freien Unbekannten die Werte 0,1,0,0,…,0 geben und die Hauptunbekannten berechnen, dann erhalten wir X (2) . Usw. Wenn wir den freien unbekannten Variablen die Werte 0,0,…,0,1 geben und die Hauptunbekannten berechnen, dann erhalten wir X (n-r) . Auf diese Weise wird das grundlegende Lösungssystem des homogenen SLAE konstruiert und seine allgemeine Lösung kann in der Form geschrieben werden.
Für inhomogene Systeme linearer algebraischer Gleichungen wird die allgemeine Lösung dargestellt als
Schauen wir uns Beispiele an.
Beispiel.
Finden Sie das grundlegende Lösungssystem und die allgemeine Lösung eines homogenen Systems linearer algebraischer Gleichungen  .
.
Lösung.
Der Rang der Hauptmatrix homogener linearer Gleichungssysteme ist immer gleich dem Rang der erweiterten Matrix. Lassen Sie uns den Rang der Hauptmatrix anhand der Randmethode der Nebenmatrix ermitteln. Als Nebenelement erster Ordnung ungleich Null nehmen wir das Element a 1 1 = 9 der Hauptmatrix des Systems. Finden Sie das angrenzende Nicht-Null-Moll zweiter Ordnung: 
Es wird ein von Null verschiedenes Moll zweiter Ordnung gefunden. Gehen wir die angrenzenden Minderjährigen dritter Ordnung auf der Suche nach einem Nicht-Null-Wert durch: 
Alle angrenzenden Minderjährigen dritter Ordnung sind gleich Null, daher ist der Rang der Haupt- und erweiterten Matrix zwei. Nehmen wir das grundlegende Moll. Der Übersichtlichkeit halber notieren wir die Elemente des Systems, aus denen es besteht: 
Die dritte Gleichung des ursprünglichen SLAE ist nicht an der Bildung des Grundmolls beteiligt und kann daher ausgeschlossen werden: 
Wir belassen die Terme, die die Hauptunbekannten enthalten, auf der rechten Seite der Gleichungen und übertragen die Terme mit freien Unbekannten auf die rechte Seite:
Konstruieren wir ein grundlegendes Lösungssystem für das ursprüngliche homogene System linearer Gleichungen. Das grundlegende Lösungssystem dieses SLAE besteht aus zwei Lösungen, da das ursprüngliche SLAE vier unbekannte Variablen enthält und die Ordnung seines grundlegenden Nebenvariablen zwei ist. Um X (1) zu finden, geben wir den freien unbekannten Variablen die Werte x 2 \u003d 1, x 4 \u003d 0, dann finden wir die wichtigsten Unbekannten aus dem Gleichungssystem  .
.
- Systeme M lineare Gleichungen mit N Unbekannt.
Lösen eines Systems linearer Gleichungen ist so eine Menge von Zahlen ( x 1 , x 2 , …, x n), wenn man diese in jede der Gleichungen des Systems einsetzt, erhält man die richtige Gleichheit.
Wo a ij , i = 1, …, m; j = 1, …, n sind die Koeffizienten des Systems;
b i , i = 1, …, m- kostenlose Mitglieder;
x j , j = 1, …, n- Unbekannt.
Das obige System kann in Matrixform geschrieben werden: EIN X = B,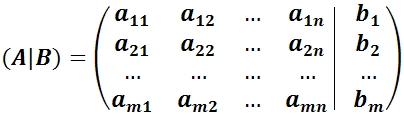

Wo ( A|B) ist die Hauptmatrix des Systems;
A— erweiterte Matrix des Systems;
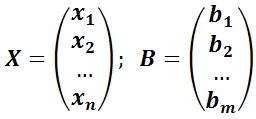
X— Spalte der Unbekannten;
B ist eine Kolumne freier Mitglieder.
Wenn die Matrix B keine Nullmatrix ∅ ist, dann heißt dieses lineare Gleichungssystem inhomogen.
Wenn die Matrix B= ∅, dann heißt dieses lineare Gleichungssystem homogen. Ein homogenes System hat immer eine Nulllösung (trivial): x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Gemeinsames System linearer Gleichungen ist ein System linearer Gleichungen, das eine Lösung hat.
Inkonsistentes System linearer Gleichungen ist ein System linearer Gleichungen, das keine Lösung hat.
Bestimmtes System linearer Gleichungen ist ein System linearer Gleichungen, das eine eindeutige Lösung hat.
Unbestimmtes System linearer Gleichungen ist ein lineares Gleichungssystem mit unendlich vielen Lösungen. - Systeme aus n linearen Gleichungen mit n Unbekannten
Wenn die Anzahl der Unbekannten gleich der Anzahl der Gleichungen ist, ist die Matrix quadratisch. Die Matrixdeterminante wird als Hauptdeterminante des linearen Gleichungssystems bezeichnet und mit dem Symbol Δ bezeichnet.
Cramer-Methode zur Lösung von Systemen N lineare Gleichungen mit N Unbekannt.
Cramers Regel.
Wenn die Hauptdeterminante eines Systems linearer Gleichungen ungleich Null ist, dann ist das System konsistent und definiert und die einzige Lösung wird mithilfe der Cramer-Formeln berechnet:
wobei Δ i die Determinanten sind, die man aus der Hauptdeterminante des Systems Δ durch Ersetzen erhält ich Spalte in die Spalte der freien Mitglieder. . - Systeme von m linearen Gleichungen mit n Unbekannten
Kronecker-Cappelli-Theorem.
Damit dieses System linearer Gleichungen konsistent ist, ist es notwendig und ausreichend, dass der Rang der Matrix des Systems gleich dem Rang der erweiterten Matrix des Systems ist. Rang(Α) = Rang(Α|B).
Wenn klingelte(Α) ≠ klingelte(Α|B), dann hat das System offensichtlich keine Lösungen.
Wenn Rang(Α) = Rang(Α|B), dann sind zwei Fälle möglich:
1) rang(Α) = n(zur Anzahl der Unbekannten) – die Lösung ist eindeutig und kann durch Cramers Formeln erhalten werden;
2) Rang(Α)< n − Es gibt unendlich viele Lösungen. - Gauß-Methode zur Lösung linearer Gleichungssysteme
Lassen Sie uns die erweiterte Matrix zusammenstellen ( A|B) des gegebenen Koeffizientensystems auf der unbekannten und rechten Seite.
Die Gaußsche Methode oder die Methode zur Eliminierung von Unbekannten besteht in der Reduzierung der erweiterten Matrix ( A|B) mit Hilfe elementarer Transformationen über seine Reihen in eine Diagonalform (in eine obere Dreiecksform). Zurück zum Gleichungssystem: Alle Unbekannten werden bestimmt.
Zu den elementaren Transformationen für Zeichenfolgen gehören Folgendes:
1) Vertauschen zweier Zeilen;
2) Multiplizieren einer Zeichenfolge mit einer anderen Zahl als 0;
3) Hinzufügen einer weiteren Zeichenfolge multipliziert mit einer beliebigen Zahl zur Zeichenfolge;
4) Verwerfen einer Nullzeichenfolge.
Eine auf eine Diagonalform reduzierte erweiterte Matrix entspricht einem dem gegebenen äquivalenten linearen System, dessen Lösung keine Schwierigkeiten bereitet. . - System homogener linearer Gleichungen.
Das homogene System hat die Form:
es entspricht der Matrixgleichung EIN X = 0.
1) Ein homogenes System ist immer konsistent, da r(A) = r(A|B), es gibt immer eine Nulllösung (0, 0, …, 0).
2) Damit ein homogenes System eine Lösung ungleich Null hat, ist es notwendig und ausreichend, dass r = r(A)< n , was Δ = 0 entspricht.
3) Wenn R< n , dann Δ = 0, dann gibt es freie Unbekannte c 1 , c 2 , …, c n-r, das System hat nichttriviale Lösungen, und davon gibt es unendlich viele.
4) Allgemeine Lösung X bei R< n kann in Matrixform wie folgt geschrieben werden:
X \u003d c 1 x 1 + c 2 x 2 + ... + c n-r x n-r,
Wo sind die Lösungen? X 1 , X 2 , …, X n-r bilden ein grundlegendes Lösungssystem.
5) Das fundamentale Lösungssystem kann aus der allgemeinen Lösung des homogenen Systems erhalten werden: ,
,
wenn wir nacheinander davon ausgehen, dass die Werte der Parameter (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1) sind.
Zerlegung der allgemeinen Lösung hinsichtlich des fundamentalen Lösungssystems ist eine Aufzeichnung der allgemeinen Lösung als lineare Kombination von Lösungen, die zum Fundamentalsystem gehören.
Satz. Damit ein System linearer homogener Gleichungen eine Lösung ungleich Null hat, ist es notwendig und ausreichend, dass Δ ≠ 0.
Wenn also die Determinante Δ ≠ 0 ist, dann hat das System eine eindeutige Lösung.
Wenn Δ ≠ 0, dann hat das System linearer homogener Gleichungen unendlich viele Lösungen.
Satz. Damit ein homogenes System eine Lösung ungleich Null hat, ist dies notwendig und ausreichend r(A)< n .
Nachweisen:
1) R mehr kann nicht sein N(Der Matrixrang überschreitet nicht die Anzahl der Spalten oder Zeilen);
2) R< n , Weil Wenn r=n, dann ist die Hauptdeterminante des Systems Δ ≠ 0, und nach Cramers Formeln gibt es eine eindeutige triviale Lösung x 1 = x 2 = ... = x n = 0, was der Bedingung widerspricht. Bedeutet, r(A)< n .
Folge. Damit ein homogenes System entsteht N lineare Gleichungen mit N Unbekannte eine Lösung ungleich Null hat, ist es notwendig und ausreichend, dass Δ = 0.
Systeme linearer Gleichungen. Vorlesung 6
Systeme linearer Gleichungen.
Grundlegendes Konzept.
System anzeigen
angerufen System - lineare Gleichungen mit Unbekannten.
Zahlen , , werden genannt Systemkoeffizienten.
Zahlen werden aufgerufen freie Mitglieder des Systems, – Systemvariablen. Matrix

angerufen die Hauptmatrix des Systems, und die Matrix

– erweitertes Matrixsystem. Matrizen - Spalten
Und entsprechend Matrizen freier Mitglieder und Unbekannter des Systems. Dann kann das Gleichungssystem in Matrixform als geschrieben werden. Systemlösung nennt man die Werte der Variablen, bei deren Ersetzung sich alle Gleichungen des Systems in echte numerische Gleichheiten verwandeln. Jede Lösung des Systems kann als Matrixspalte dargestellt werden. Dann ist die Matrixgleichung wahr.
Das Gleichungssystem heißt gemeinsam wenn es mindestens eine Lösung hat und unvereinbar wenn es keine Lösung gibt.
Ein System linearer Gleichungen zu lösen bedeutet, herauszufinden, ob es kompatibel ist, und, wenn es kompatibel ist, seine allgemeine Lösung zu finden.
Das System heißt homogen wenn alle seine freien Terme gleich Null sind. Ein homogenes System ist immer kompatibel, weil es eine Lösung hat
Der Kronecker-Kopelli-Satz.
Die Antwort auf die Frage nach der Existenz von Lösungen linearer Systeme und ihrer Eindeutigkeit ermöglicht es uns, das folgende Ergebnis zu erhalten, das als folgende Aussagen über ein System linearer Gleichungen mit Unbekannten formuliert werden kann
 (1)
(1)
Satz 2. Das lineare Gleichungssystem (1) ist genau dann konsistent, wenn der Rang der Hauptmatrix gleich dem Rang der erweiterten Matrix ist (.
Satz 3. Wenn der Rang der Hauptmatrix eines gemeinsamen Systems linearer Gleichungen gleich der Anzahl der Unbekannten ist, dann hat das System eine eindeutige Lösung.
Satz 4. Wenn der Rang der Hauptmatrix eines gemeinsamen Systems kleiner ist als die Anzahl der Unbekannten, dann hat das System unendlich viele Lösungen.
Regeln zum Lösen von Systemen.
3. Finden Sie den Ausdruck der Hauptvariablen durch die freien Variablen und erhalten Sie die allgemeine Lösung des Systems.
4. Durch Zuweisen beliebiger Werte zu freien Variablen werden alle Werte der Hauptvariablen erhalten.
Methoden zur Lösung linearer Gleichungssysteme.
Methode der inversen Matrix.

und d. h. das System verfügt über eine einzigartige Lösung. Wir schreiben das System in Matrixform
Wo  ,
,
.
,
,
.
Multiplizieren Sie beide Seiten der Matrixgleichung links mit der Matrix
Da erhalten wir , woraus wir Gleichheit für die Suche nach Unbekannten erhalten
Beispiel 27. Lösen Sie das lineare Gleichungssystem mit der Methode der inversen Matrix 
Lösung. Bezeichnen Sie mit der Hauptmatrix des Systems
 .
.
Lassen Sie, dann finden wir die Lösung durch die Formel.
Berechnen wir.

Seitdem verfügt das System über eine einzigartige Lösung. Finden Sie alle algebraischen Additionen
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Auf diese Weise
 .
.
Lass uns das Prüfen

 .
.
Die inverse Matrix wurde korrekt gefunden. Von hier aus finden wir mithilfe der Formel die Variablenmatrix.

 .
.
Wenn wir die Werte der Matrizen vergleichen, erhalten wir die Antwort: .
Cramers Methode.
Gegeben sei ein lineares Gleichungssystem mit Unbekannten

und d. h. das System verfügt über eine einzigartige Lösung. Wir schreiben die Lösung des Systems in Matrixform oder

![]()
Bezeichnen


. . . . . . . . . . . . . . ,

Somit erhalten wir Formeln zum Ermitteln der Werte der Unbekannten, die aufgerufen werden Cramers Formeln.
![]()
Beispiel 28. Lösen Sie das folgende lineare Gleichungssystem mit der Cramer-Methode  .
.
Lösung. Finden Sie die Determinante der Hauptmatrix des Systems
 .
.
Seitdem verfügt das System über eine einzigartige Lösung.
Finden Sie die verbleibenden Determinanten für Cramers Formeln
 ,
,
 ,
,
 .
.
Mit den Formeln von Cramer ermitteln wir die Werte der Variablen
Gauß-Methode.
Die Methode besteht im sequentiellen Ausschluss von Variablen.
Gegeben sei ein lineares Gleichungssystem mit Unbekannten.

Der Gaußsche Lösungsprozess besteht aus zwei Schritten:
Im ersten Schritt wird die erweiterte Matrix des Systems mit Hilfe elementarer Transformationen auf die Stufenform reduziert
 ,
,
wo , was dem System entspricht

Danach die Variablen ![]() gelten als frei und werden in jeder Gleichung auf die rechte Seite übertragen.
gelten als frei und werden in jeder Gleichung auf die rechte Seite übertragen.
Im zweiten Schritt wird die Variable aus der letzten Gleichung ausgedrückt und der resultierende Wert in die Gleichung eingesetzt. Aus dieser Gleichung
Variable ausgedrückt wird. Dieser Vorgang dauert bis zur ersten Gleichung. Das Ergebnis ist ein Ausdruck der Hauptvariablen in Form der freien Variablen ![]() .
.
Beispiel 29. Lösen Sie das folgende System mit der Gaußschen Methode

Lösung. Schreiben wir die erweiterte Matrix des Systems auf und reduzieren sie auf die Stufenform

 .
.
Als ![]() größer ist als die Anzahl der Unbekannten, dann ist das System kompatibel und hat unendlich viele Lösungen. Schreiben wir das System für die Stufenmatrix auf
größer ist als die Anzahl der Unbekannten, dann ist das System kompatibel und hat unendlich viele Lösungen. Schreiben wir das System für die Stufenmatrix auf

Die Determinante der erweiterten Matrix dieses Systems, bestehend aus den ersten drei Spalten, ist ungleich Null, daher betrachten wir sie als grundlegend. Variablen
Wird einfach sein und die Variable wird kostenlos sein. Verschieben wir es in allen Gleichungen auf die linke Seite

Aus der letzten Gleichung drücken wir aus
![]()
Wenn wir diesen Wert in die vorletzte zweite Gleichung einsetzen, erhalten wir
![]()
![]() Wo
Wo ![]() . Wenn wir die Werte der Variablen und in die erste Gleichung einsetzen, finden wir
. Wenn wir die Werte der Variablen und in die erste Gleichung einsetzen, finden wir ![]() . Wir schreiben die Antwort in das folgende Formular
. Wir schreiben die Antwort in das folgende Formular
MIT N unbekannt ist ein System der Form:
Wo aij Und b i (i=1,…,m; b=1,…,n) sind einige bekannte Zahlen, und x 1 ,…,x n- unbekannte Zahlen. In der Notation der Koeffizienten aij Index ich bestimmt die Nummer der Gleichung und die zweite J ist die Nummer der Unbekannten, bei der dieser Koeffizient liegt.
Homogenes System - wenn alle freien Mitglieder des Systems gleich Null sind ( b 1 = b 2 = ... = b m = 0), ist die umgekehrte Situation heterogenes System.
Quadratisches System - wenn die Zahl M Gleichungen gleich der Zahl N Unbekannt.
Systemlösung- Satz N Zahlen c 1 , c 2 , …, c n , so dass die Substitution aller c ich anstatt x i in ein System verwandelt alle seine Gleichungen in Identitäten.
Gelenksystem - wenn das System mindestens eine Lösung hat, und inkompatibles System wenn das System keine Lösungen hat.
Ein solches gemeinsames System (wie oben angegeben, sei es (1)) kann eine oder mehrere Lösungen haben.
Lösungen c 1 (1) , c 2 (1) , …, c n (1) Und c 1 (2), c 2 (2), …, c n (2) Gelenksystem vom Typ (1) wird verschieden, wenn auch nur eine der Gleichungen nicht erfüllt ist:
c 1 (1) = c 1 (2) , c 2 (1) = c 2 (2) , …, c n (1) = c n (2) .
Ein gemeinsames System vom Typ (1) wird bestimmt wenn es nur eine Lösung gibt; Wenn ein System mindestens zwei verschiedene Lösungen hat, wird es unterbestimmt. Wenn es mehr Gleichungen als Unbekannte gibt, ist das System neu definiert.
Die Koeffizienten für die Unbekannten werden als Matrix geschrieben:

Es wird genannt Systemmatrix.
Die Zahlen, die auf der rechten Seite der Gleichungen stehen, b 1 ,…,b m Sind kostenlose Mitglieder.
Aggregat N Zahlen c 1 ,…,c n ist eine Lösung für dieses System, wenn alle Gleichungen des Systems nach dem Einsetzen von Zahlen in Gleichheit umgewandelt werden c 1 ,…,c n anstelle der entsprechenden Unbekannten x 1 ,…,x n.
Bei der Lösung eines linearen Gleichungssystems können sich drei Möglichkeiten ergeben:
1. Das System hat nur eine Lösung.
2. Das System hat unendlich viele Lösungen. Zum Beispiel, . Die Lösung dieses Systems besteht aus allen Zahlenpaaren, die sich im Vorzeichen unterscheiden.
3. Das System hat keine Lösungen. Zum Beispiel, , wenn eine Lösung existiert, dann x 1 + x 2 ist gleichzeitig 0 und 1.
Methoden zur Lösung linearer Gleichungssysteme.
Direkte Methoden Geben Sie einen Algorithmus an, mit dem die genaue Lösung gefunden wird SLAU(Systeme linearer algebraischer Gleichungen). Und wenn die Genauigkeit absolut wäre, hätten sie es gefunden. Ein echter elektrischer Computer arbeitet natürlich mit einem Fehler, daher wird die Lösung ungefähr sein.
Viele praktische Probleme reduzieren sich auf die Lösung algebraischer Gleichungssysteme 1. Grades oder, wie sie üblicherweise genannt werden, linearer Gleichungssysteme. Wir werden lernen, solche Systeme zu lösen, ohne dass die Anzahl der Gleichungen mit der Anzahl der Unbekannten übereinstimmen muss.
Im Allgemeinen wird das lineare Gleichungssystem wie folgt geschrieben:
Hier sind die Zahlen aij– Chancen Systeme, b ich – freie Mitglieder, x i- Symbole Unbekannt . Es ist sehr praktisch, die Matrixnotation einzuführen: hauptsächlich Matrix des Systems, – Matrix-Spalte der freien Terme, – Matrix-Spalte der Unbekannten. Dann lässt sich das System wie folgt schreiben: AXT=B oder genauer:
Wenn Sie auf der linken Seite dieser Gleichheit eine Matrixmultiplikation nach den üblichen Regeln durchführen und die Elemente der resultierenden Spalte mit den Elementen gleichsetzen IN, dann kommen wir zur ursprünglichen Systemnotation.
Beispiel 14. Wir schreiben dasselbe System linearer Gleichungen auf zwei verschiedene Arten:
Das lineare Gleichungssystem wird üblicherweise als System bezeichnet gemeinsam , wenn es mindestens eine Lösung hat, und unvereinbar, wenn es keine Lösungen gibt.
In unserem Beispiel ist das System kompatibel, die Spalte ist seine Lösung:
Diese Lösung kann auch ohne Matrizen geschrieben werden: X=2,J=1 . Wir nennen das Gleichungssystem unsicher , wenn es mehr als eine Lösung hat, und bestimmt wenn die Lösung eindeutig ist.
Beispiel 15. Das System ist unbestimmt. Zum Beispiel sind seine Lösungen. Der Leser kann viele andere Lösungen für dieses System finden.
Lassen Sie uns zunächst lernen, wie man lineare Gleichungssysteme in einem bestimmten Fall löst. Das Gleichungssystem OH=IN Wir werden anrufen Kramerowskaja , wenn seine Hauptmatrix A sind quadratisch und nicht entartet. Mit anderen Worten: Im Cramer-System stimmt die Anzahl der Unbekannten mit der Anzahl der Gleichungen und überein.
Satz 6. (Cramer-Regel). Das Cramer-System linearer Gleichungen hat eine einzigartige Lösung, die durch die Formeln gegeben ist:
wo ist die Determinante der Hauptmatrix, ist die daraus erhaltene Determinante D Ersatz ich-te Spalte mit einer Spalte freier Mitglieder.
Kommentar. Cramer-Systeme können auch auf andere Weise gelöst werden, nämlich mit der inversen Matrix. Wir schreiben ein solches System in Matrixform: AXT=IN. Da gibt es eine inverse Matrix A –1 . Wir multiplizieren die Matrixgleichheit mit A –1 links: A –1 OH=A –1 IN. Als A –1 OH=EX=X, dann ist die Lösung des Systems gefunden: X= A –1 IN.Wir nennen diese Lösungsmethode Matrix . Wir betonen noch einmal, dass es nur für Cramer-Systeme geeignet ist – in anderen Fällen existiert die inverse Matrix nicht. Nachfolgend findet der Leser die analysierten Anwendungsbeispiele der Matrixmethode und der Cramer-Methode.
Lassen Sie uns abschließend den allgemeinen Fall, das System, untersuchen M lineare Gleichungen mit N Unbekannt. Um es zu lösen, bewerben Sie sich Gauß-Methode , was wir im Detail betrachten werden. Für ein beliebiges Gleichungssystem OH=IN ausschreiben erweitert Matrix. Daher ist es üblich, die Matrix zu nennen, die sich als Hauptmatrix herausstellt A Fügen Sie rechts eine Spalte mit freien Mitgliedern hinzu IN:
Wie bei der Rangberechnung bringen wir unsere Matrix mit Hilfe elementarer Zeilentransformationen und Spaltenpermutationen in eine Trapezform. In diesem Fall ändert sich natürlich das der Matrix entsprechende Gleichungssystem, aber es wird so sein ist gleichbedeutend mit Original (ᴛ.ᴇ. wird die gleichen Lösungen haben). Tatsächlich ändert das Umstellen oder Hinzufügen von Gleichungen nichts an den Lösungen. Spalten neu anordnen – auch: Gleichungen x 1+3x2+7x3=4 Und x 1+7x3+3x2=4, sind natürlich gleichwertig. Es muss lediglich notiert werden, welcher unbekannten Spalte die entsprechende Spalte entspricht. Wir ordnen die Spalte der freien Mitglieder nicht neu an – sie wird normalerweise durch eine gepunktete Linie in der Matrix von anderen getrennt. In der Matrix vorkommende Nullzeilen können weggelassen werden.
Beispiel 1. Lösen Sie das Gleichungssystem:
Lösung. Wir schreiben die erweiterte Matrix aus und bringen sie in eine Trapezform. Zeichen ~ Jetzt bedeutet nicht nur das Zusammentreffen der Ränge, sondern auch die Äquivalenz der entsprechenden Gleichungssysteme.
~ . Lassen Sie uns die durchgeführten Schritte erklären.
Aktion 1. Die 1. Zeile wurde zur 2. Zeile addiert und mit multipliziert (–2). Zur 3. und 4. Zeile addierten sie die 1. und multiplizierten sie mit (–3). Der Zweck dieser Operationen besteht darin, Nullen in der ersten Spalte unterhalb der Hauptdiagonale zu erhalten.
Aktion 2. Da es auf der Diagonale Platz (2,2) gibt 0 , ich musste die 2. und 3. Spalte neu anordnen. Um uns an diese Permutation zu erinnern, haben wir oben die Symbole der Unbekannten geschrieben.
Aktion 3. Zur dritten Zeile addierten sie die zweite und multiplizierten sie mit (–2). Die 2. Zeile wurde zur 4. Zeile hinzugefügt. Das Ziel besteht darin, in der zweiten Spalte unterhalb der Hauptdiagonalen Nullen zu erhalten.
Aktion 4. Nulllinien können entfernt werden.
Die Matrix wird also auf eine Trapezform reduziert. Ihr Rang R=2 . Unbekannt x1, x3- Basic; x2, x4- frei. Weisen wir den freien Unbekannten beliebige Werte zu:
x 2= a, x 4= B.
Hier a, b sind beliebige Zahlen. Nun zur letzten Gleichung des neuen Systems
x 3+x4= –3
finden x3: x3= –3 –B. Aufsteigend, von der ersten Gleichung
x 1+3x 3+2x 2+4x4= 5
finden x1: x1=5 –3(–3 –B)–2a–4b= 14 –2a–B.
Wir schreiben die allgemeine Lösung auf:
x 1=14 –2a–b, x2=a,x3=–3 –b,x4=B.
Sie können die allgemeine Lösung in Form einer Matrixspalte schreiben:
Für bestimmte Werte A Und B, du kannst bekommen Privat Lösungen. Zum Beispiel wann A=0,b=1 wir erhalten: ist eine der Lösungen des Systems.
Bemerkungen. Im Gauß-Methode-Algorithmus haben wir gesehen (Fall 1), dass die Inkonsistenz des Gleichungssystems mit der Nichtübereinstimmung der Ränge der Haupt- und erweiterten Matrizen zusammenhängt. Wir präsentieren den folgenden wichtigen Satz ohne Beweis.
Satz 7 (Kronecker-Capelli). Ein System linearer Gleichungen ist genau dann konsistent, wenn der Rang der Hauptmatrix gleich dem Rang der erweiterten Matrix des Systems ist.
Systeme linearer Gleichungen – Konzept und Typen. Einordnung und Merkmale der Kategorie „Systeme linearer Gleichungen“ 2017, 2018.
Damit seine Zeilen (oder Spalten) linear abhängig sind. Gegeben sei ein System mit m linearen Gleichungen mit n Unbekannten: 5.1. Lassen Sie uns die folgende Notation einführen. 5.2., - die Matrix des Systems - seine erweiterte Matrix. - Spalte der freien Mitglieder. - Spalte der Unbekannten. Wenn... .
nichtlineare Optimierung (NNO) und umgekehrt. Lösung des ZNO-Problems: Finden Sie (8.1) ein Minimum oder ein Maximum in einem Bereich D. Wie wir uns aus der Matte erinnern. Bei der Analyse sollte man die partiellen Ableitungen mit Null gleichsetzen. Somit wurde ZNO (8.1) auf SLE (8.2) (8.2) von n nichtlinearen Gleichungen reduziert. ... .
Vorlesung 15 Betrachten Sie ein inhomogenes System (16). Wenn die entsprechenden Koeffizienten eines homogenen Systems (7) gleich den entsprechenden Koeffizienten eines inhomogenen Systems (16) sind, dann wird das homogene System (7) als entsprechendes inhomogenes System (16) bezeichnet. . Satz. Wenn... [weiterlesen] .
7.1 Homogene lineare Gleichungssysteme. Gegeben sei ein homogenes System linearer Gleichungen (*) Angenommen, eine Menge von Zahlen sei eine Art Lösung für dieses System. Dann ist die Zahlenmenge auch eine Lösung. Dies wird durch direkte Substitution in die Gleichungen des Systems verifiziert.... .
Tabelle 3 Stadien der motorischen Entwicklung eines Kindes Stadium Alter Indikatoren der motorischen Entwicklung Geburtszeit bis 4 Monate Ausbildung der Kontrolle über die Position des Kopfes und die Möglichkeit seiner freien Orientierung im Raum 4-6 Monate Beherrschung der ersten ... .
Definition 1. Ein System linearer Gleichungen der Form (1), wobei das Feld ein System von m linearen Gleichungen mit n Unbekannten über dem Feld genannt wird, die Koeffizienten der Unbekannten sind und die freien Mitglieder des Systems sind ( 1). Definition 2. Ein geordnetes n-ka (), wobei die Lösung eines Systems von linearen ... genannt wird.
Wir empfehlen auch
 Pyrolysekessel zum Selbermachen: Anweisungen und Zeichnungen
Pyrolysekessel zum Selbermachen: Anweisungen und Zeichnungen
 Selbstregulierendes Heizkabel für Sanitärinstallationen: ein Überblick über die Installationstechnik
Selbstregulierendes Heizkabel für Sanitärinstallationen: ein Überblick über die Installationstechnik
 Arten beheizter Rohre für die Wasserversorgung – Vorteile und Anwendungsbeispiele
Arten beheizter Rohre für die Wasserversorgung – Vorteile und Anwendungsbeispiele
 Allgemeine Ideen zur Ofenauskleidung
Allgemeine Ideen zur Ofenauskleidung
 Zusammenklappbare Kohlenpfanne zum Selbermachen
Zusammenklappbare Kohlenpfanne zum Selbermachen
 Wir stellen mit unseren eigenen Händen einen effektiven Schornsteinzugverstärker her – Schritt-für-Schritt-Anleitungen, Zeichnungen und Fotos
Wir stellen mit unseren eigenen Händen einen effektiven Schornsteinzugverstärker her – Schritt-für-Schritt-Anleitungen, Zeichnungen und Fotos